





























29
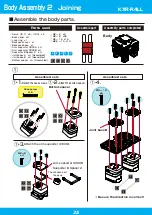
Wheel leg
x4
C D
B
◯Servo(ID2) x2, (ID3) x2
(ID5) x2, (ID6) x2
◯Upper arm 3300-26 x4
◯Flat frame x8
◯Arm supporter 3300B x4
◯Supporter B Spacer x8
◯Wheel 60 x8
◯Tire 60 x4
◯Wheel spacer x4
◯Horn B x4
◯M2 ー 6 x32
◯M2 ー 8 x16
◯M2 ー 12 x16
◯M3 ー 6 x4
◯M3 ー 12 x4
◯ZH Connection cable 2
120mm x8
②
Detach case screws.
Assemble 4 sets.
*Servo combination
Case screw
x8
①
M3 ー 6
Upper arm 3300-26
Flat frame
③
*With the flat frame, the leg length can be
adjusted by changing the attachment
position. In this project example, the
Long type is used.
Short
Middle
Long
■
Assemble wheel leg.
Assemble part
Assembly parts completed
Parts used
*Confirm the servo origin
and attach it straight.
Case screw
x4
Wheel leg
KXR-R4LL
Содержание KXR-R4LL
Страница 28: ...28 Body Assembly 2 Joining Body Attach all four areas 200mm x4 KXR R4LL...
Страница 31: ...31 Attach the cable 120mm 120mm Wheel Leg Assemble 4 sets Wheel leg KXR R4LL...
Страница 37: ...37 Complete Assembly completed The following will explain how to mount the battery and run motions KXR R4LL...
Страница 60: ......







































































