





























Danaher Motion
06/2005
PHASER
8. PHASER
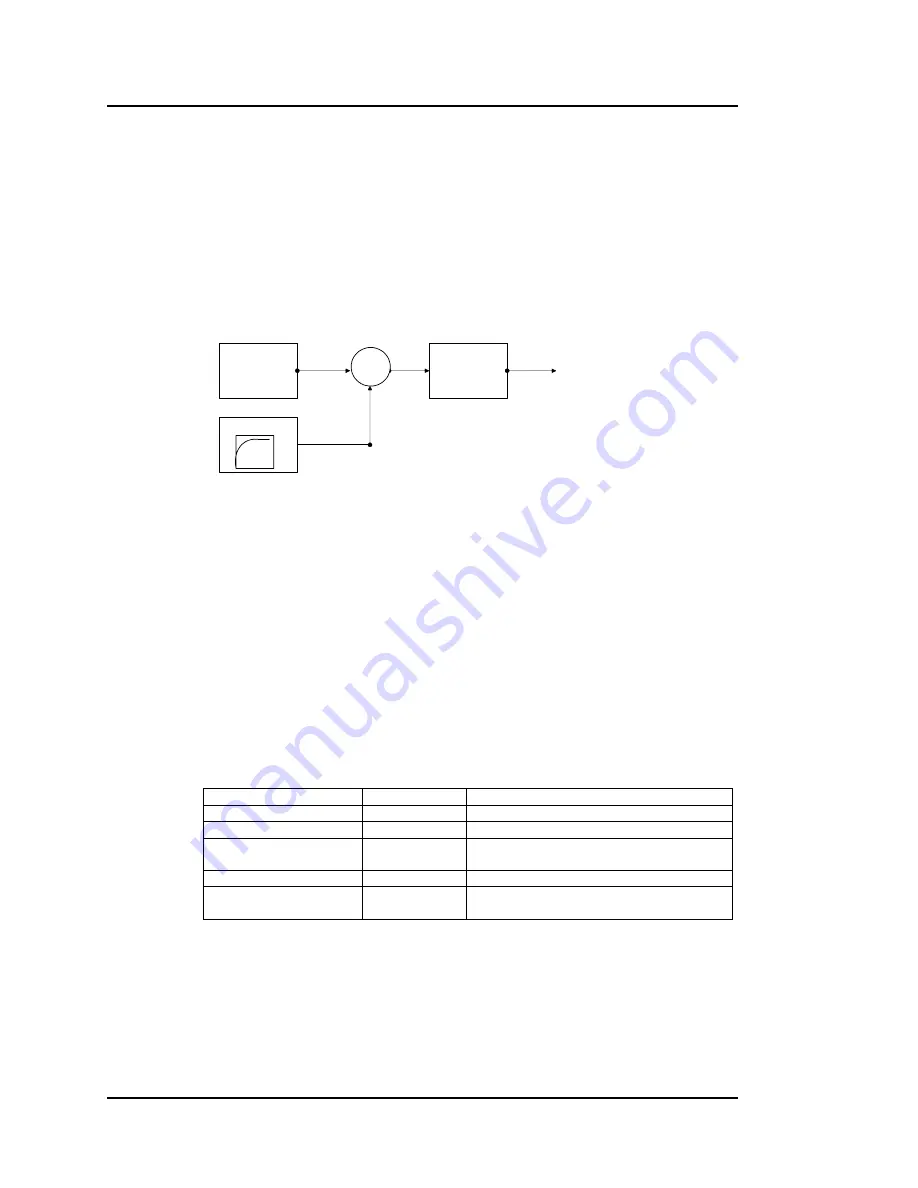
The purpose of
PHASER
is to amplify or attenuate the master input value
before entering the cam table or before multiplying by the gear ratio.
The master - slave connection is achieved either by a cam table or through
gearing. A typical problem in camming is an offset in the master position that
has to be compensated for before translating the value with a cam table.
PHASER
adds a correction to the master position. This avoids unexpected
jumps at the slave position. By immediately adding the maximum correction
value, there is a dynamically computation of the correction from zero to the
maximum value.
Slave Position
Master
Position
CAM Table
Phaser
+
Several slaves
can be connected to the same master, but the position
correction is set per slave.
PHASER
is a slave command and its effects do
not harm other slaves connected to the same master. Directly disconnection
of the slave (SLAVE = OFF) automatically stops
PHASER
.
8.1.1. Profiler
PHASER
is a type of
MOVE
, so all the command’s rules and limitations are
imported. As an input,
PHASER
gets the maximum offset added or
subtracted from the master position. The offset value is equivalent to the
target position of
MOVE
. The rate at which the offset changes is determines
by the profiler. Similar to
MOVE
,
the profiler is calculated according to the
slave’s motion properties (
ACCELERATION
,
DECELERATION
and
JERK
).
All changes in these values must be performed in the nodal context so the
slave‘s property definitions are not effected.
Comparing
PHASER
and
MOVE
:
Properties
MOVE
PHASER
Element
Axis or group
Slaved axis only
Position Target
Maximum
offset
Ratio factor
None
Translation factor between master units
and slave units
Kinematics properties
All
All
STARTTYPE
All types
All types (special relevance is
IMMEDIATE)
M-SS-005-03 Rev
E
141







































































