





























Danaher Motion
06/2005
Master-Slave
Step 5: Enable the Axis
At this point, camming is enabled. However, you
must enable the drive to see motion:
A1.Enable = ON
Camming cannot be enabled if the axis is in a
relative or absolute move, or during
STOP
.
Enabling camming when gearing is enabled or
when an absolute move is being executed
generates an error. Disabling or enabling the drive
does not affect whether gearing is enabled.
To disable camming, set
SLAVE
to OFF:
A1.Slave = OFF 'Disable camming
When camming is disabled, the velocity of the
slave axis is decelerated to zero at the rate of
<axis>.DECELERATIONMAX
(
<axis>.DMAX
).
Issuing
JOG
or
STOP
for the axis disables
camming. Issuing
STOP
turns camming off
immediately. The velocity of the axis is decelerated
to zero at the rate set by
<axis>.DECELERATIONMAX
.
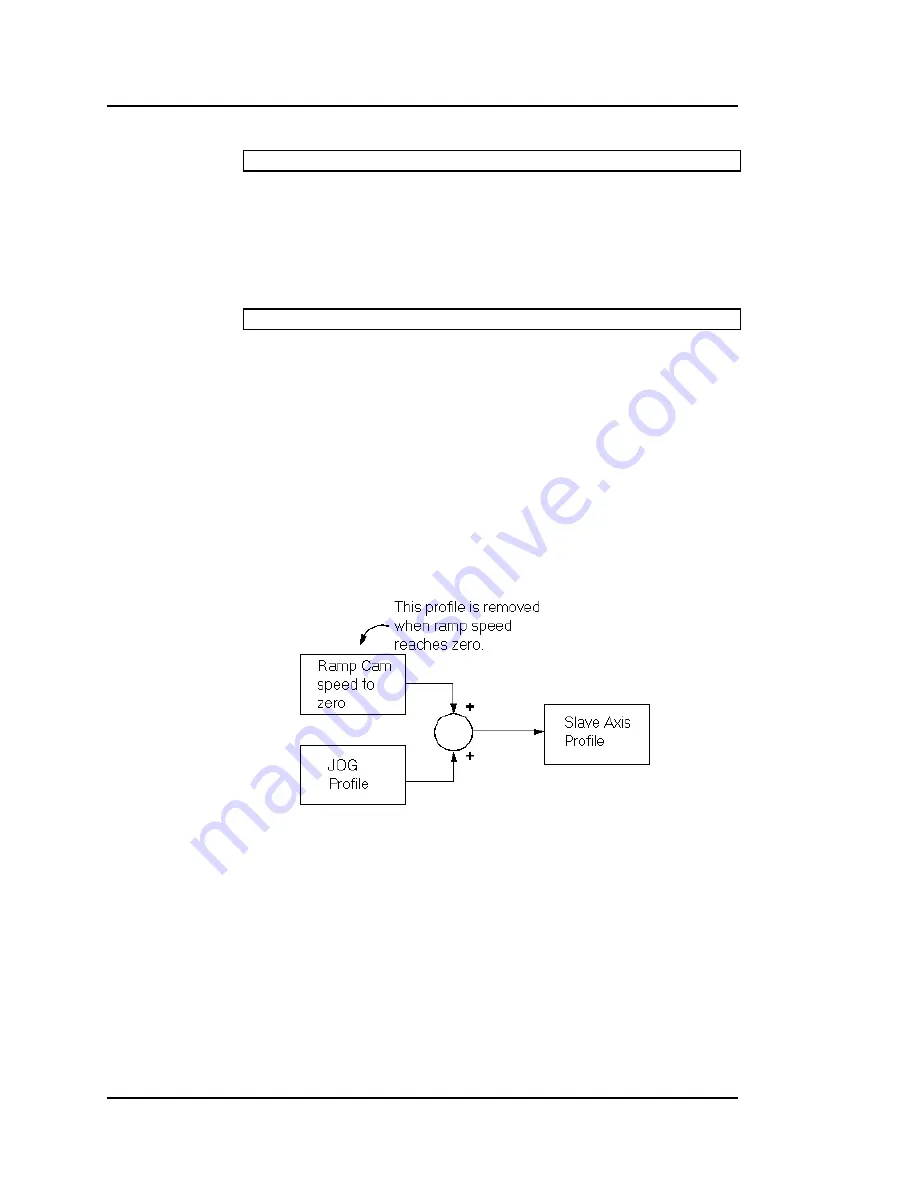
If
JOG
command is issued, camming on that axis
is disabled immediately and the cam profile ramps
to zero at the rate,
<axis>.DEC
. The
JOG
profile
ramps up at the rate specified by
<axis>.ACC
. For
a short time, the axis profile is the sum of these two
profiles as shown below.
After the camming profile goes to zero, the profile
is controlled wholly by the
JOG
profile. Disabling
the master or slave does not disable camming.
Camming remains active and the slave position is
commanded accordingly, when re-enabled. A fault
is generated when the drive is re-enabled if the
distance between the slave position and the
command from the cam table is greater than
POSITIONERRORMAX
. Be cautious when re-
enabling a cammed slave axis if a large position
error exists. The motor rapidly upon enable to
immediately correct this error.
M-SS-005-03 Rev
E
117