





























____________________ _
ADL300-EPCv2- User Guide
Page 19 of 64
3.3.6 FloorCall command
This command is used to request positioning of the lift car at a specific floor.
This command has the following operating mode:
1. On the rising edge of the FloorCall command a request is sent to position the lift car at the requested
floor.
2. The lift starts to execute the positioning operation at the requested floor. The following events may occur
while the lift car is moving:
•
Removal of the FloorCall command: nothing happens.
•
Resending of the FloorCall command, to a new floor: the following situations are possible:
-
The new floor that has been requested cannot be reached because it has already been passed
or because the lift could not stop at the position of the new floor. The lift therefore continues as
per the original plan.
-
The new floor that has been requested can be reached and the lift moves towards the new floor.
This command can
ONLY
be executed if the Self Study sequence has been successfully completed, and the
SelfStudyOk
parameter is set to
TRUE
.
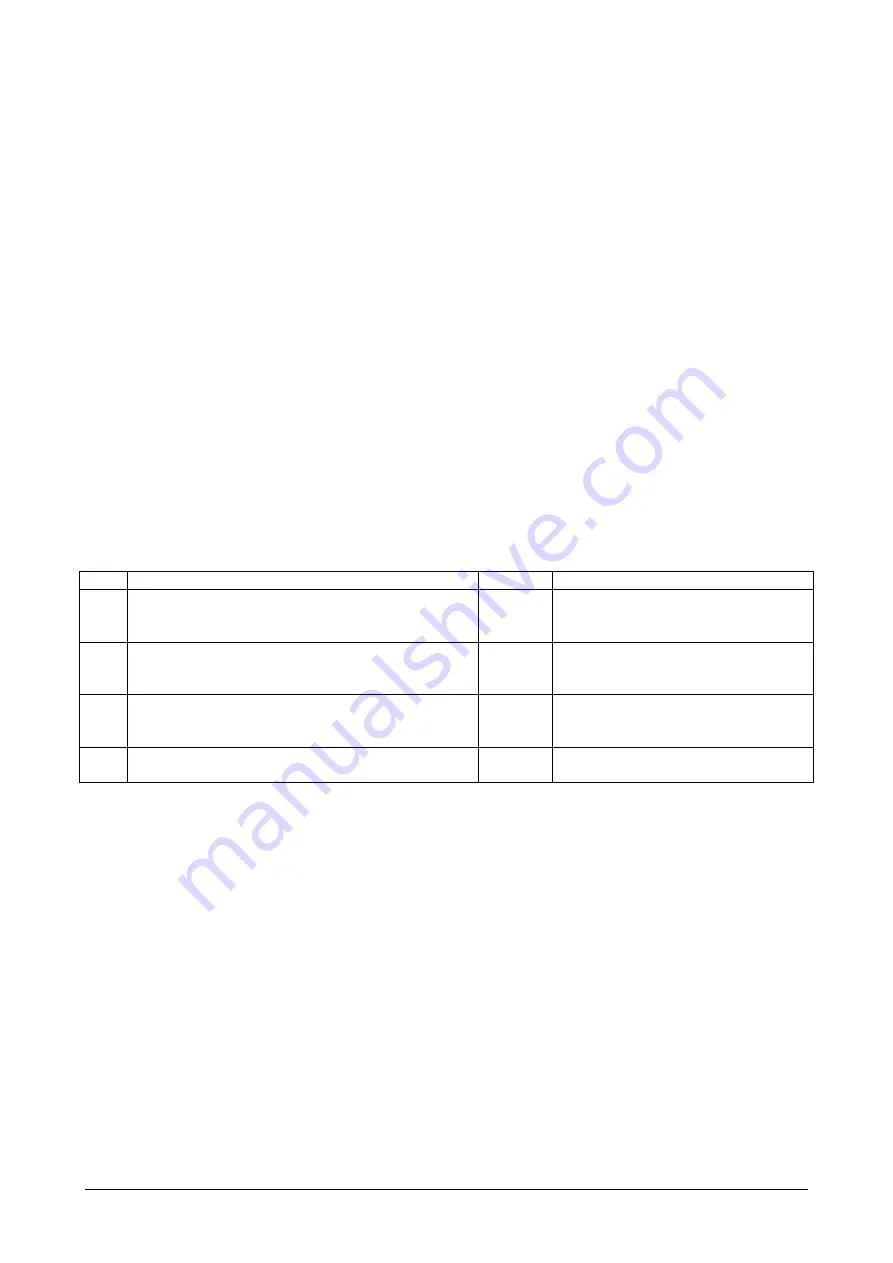
3.3.7 Reverse command
The reverse command has four operating modes:
Case
Cause
Action
Description
1
Maintenance input closed (enable)
JogRev
Executes the jog reverse command
See "Reverse command with
Maintenance input = enable" section
2
Maintenance input open (disable)
Zero cycle not done (ZeroFound = FALSE)
Lift car stopped NOT at top floor
See "Reverse command before zero
cycle not from last floor" section
3
Maintenance input open (disable)
Zero cycle not done (ZeroFound = FALSE)
Lift car stopped at top floor
See "Reverse command before zero
cycle from last floor" section
4
Maintenance input open (disable)
Zero cycle done (ZeroFound = TRUE)
See "Reverse command after zero
cycle" section
Reverse command with Maintenance input = enable
If the Maintenance input is closed (enable) when the reverse command is sent the control system acts as if
the JogRev command had been set.
Reverse command before zero cycle
If the reverse command is sent before the incremental encoder and floor counter have been initialised, a
zero cycle is executed.
This command can ONLY be executed if the Self Study sequence has been successfully completed, and the
SelfStudyOk parameter is set to TRUE.
Reverse command after zero cycle
The reverse command following execution of the zero cycle, indicated by the ZeroFound= TRUE output,
functions as follows:
•
On the rising edge of the command the lift starts moving towards floor 0. The following events may
occur during this movement:
-
Nothing happens: the lift reaches floor 0 executing the normal deceleration ramp as set.
-
Removal of the reverse command: the lift stops at any point after executing the normal set
deceleration ramp.
-
The stop command becomes TRUE causing the lift to stop at the first possible floor.







































































