





























T3-B T6-B Manipulator 4. Setting of End Effectors
T-B series Rev.1
73
T6-B
0 0.020 0.040 0.060 0.080 0.1
(kg
·
m
2
)
120
100
80
60
40
20
(%)
100
Inertia moment parameter
75
60
35
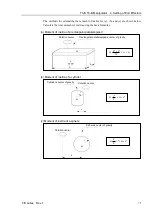
Eccentric Quantity and the Inertia Setting
CAUTION
■
The eccentric quantity of load (weight of the end effector and work piece) must be
T3-B: 100mm / T6-B: 150mm or less. The T-B series Manipulators are not
designed to work with eccentric quantity exceeding T3-B: 100mm / T6-B: 150mm.
Always set the Weight parameters according to the load. Setting a value that is
smaller than the actual load may cause errors, excessive shock and insufficient
function of the Manipulator. Also, the life cycle of parts is shortened and positional
gap due to belt tooth bumping occurs.
The acceptable eccentric quantity of load in T-B series:
T3-B: default rating 0 mm, at the maximum: 100 mm
T6-B: default rating 0 mm, at the maximum: 150 mm
When the eccentric quantity of load exceeds the rating, change the setting of eccentric
quantity parameter of Inertia command. After the setting is changed, the maximum
acceleration/deceleration speed of the Manipulator at PTP motion corresponding to the
“eccentric quantity” is set automatically.
Position of load’s center of gravity
Rotation center
Eccentric quantity
Eccentric Quantity
Eccentric quantity of load on the shaft
The eccentric quantity of load (weight of the end effector and work piece) on the shaft can
be set by “eccentric quantity” parameter of Inertia command.
EPSON
RC+
Enter a value into the [Eccentricity:] text box on the [Inertia] panel ([Tools]-[Robot
Manager]). (You may also execute the Inertia command from the [Command Window].)
Содержание T-B Series
Страница 1: ...SCARA ROBOT T B series MANUAL Rev 1 EM217R4788F ...
Страница 2: ...SCARA Robots T B series Manual Rev 1 ...
Страница 15: ...TABLE OF CONTENTS T B series Rev 1 xiii T6 B602S J3 165 Appendix D Open Source Software License 167 ...
Страница 16: ...TABLE OF CONTENTS xiv T B series Rev 1 ...
Страница 17: ...Installation This volume describes the flow from unpacking to operation and designing the robot system ...
Страница 18: ......
Страница 40: ...Installation 5 Second Step 24 T B series Rev 1 ...
Страница 42: ......
Страница 58: ...T3 B T6 B Manipulator 2 Specifications 42 T B series Rev 1 2 3 Outer Dimensions 2 3 1 T3 B ...
Страница 59: ...T3 B T6 B Manipulator 2 Specifications T B series Rev 1 43 2 3 2 T6 B ...
Страница 77: ...T3 B T6 B Manipulator 3 Environments and Installation T B series Rev 1 61 T6 B A B ...
Страница 158: ...T3 B T6 B Manipulator 18 Error Code List 142 T B series Rev 1 ...
Страница 160: ......
Страница 168: ......
Страница 178: ...Appendix B Time and Distance of Free Running in Emergency 162 T B series Rev 1 ...
Страница 182: ...Appendix C Time and Distance of Free Running When Safeguard Is Opened 166 T B series Rev 1 ...







































































