





























U Page 33
Digital controller RK 4004
.2.4. motion direction
The positioning direction of the DC actuator drive may be inverted via
this parameter.
Following inversion of the positioning direction an initialisation run
must be performed.
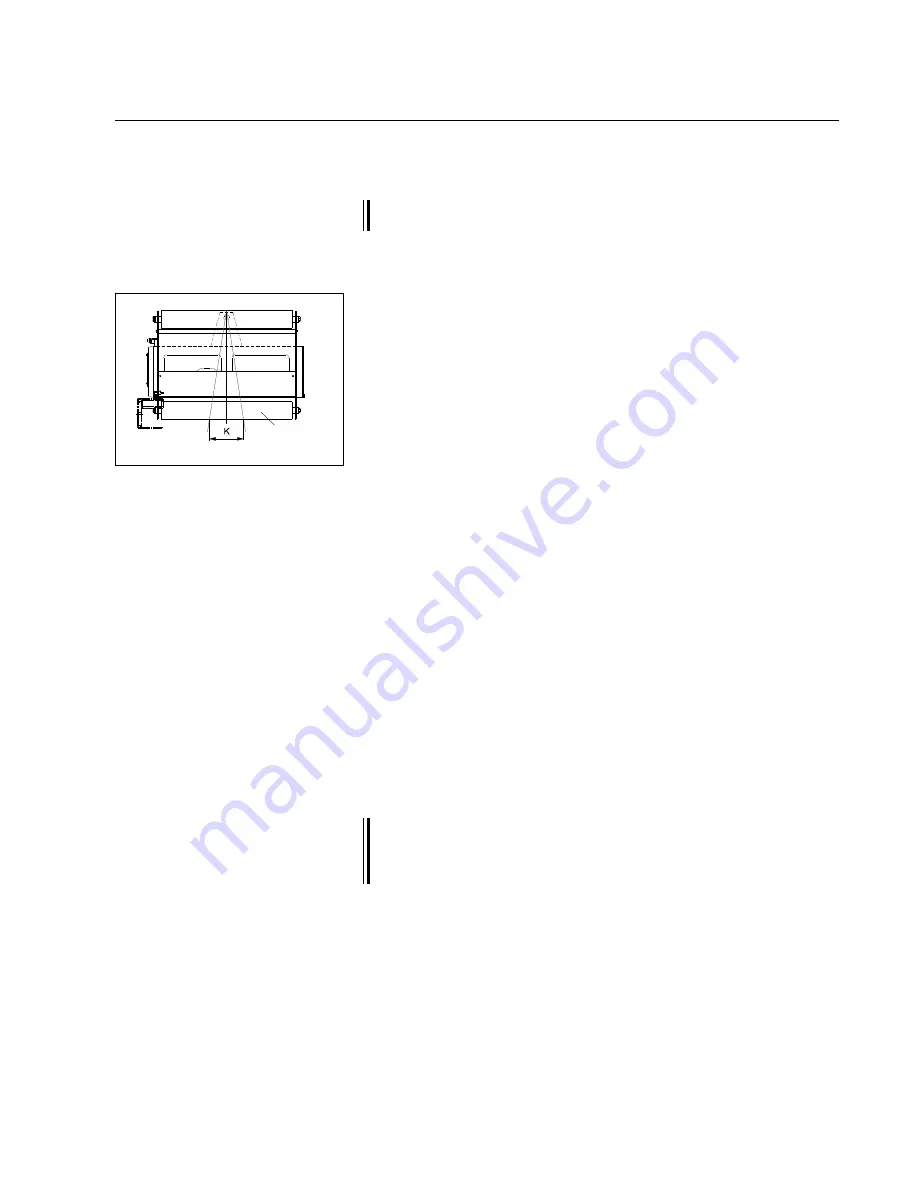
.2.5. motion range total
The actual positioning path (dimension K) covered by the actuator at
the outfeed (transfer roller) must be entered in this parameter. As on
certain actuators (e.g. pivoting frames) the actuator positioning path
is not identical to that of the DC actuator drive, the exact value must
be entered.
The mechanical ratio (".3.7. mech. gear factor") is determined via this
setting during the initialisation run and the motor gear constant calcu-
lated. The latter effects the normalisation of the positioning speed
and path.
.2.6. posito
.2.7. positionrange -
Via the position range limit the DC actuator drive is prevented from
reaching its mechanical spindle stop or the actuator its mechanical
stop.
On compact systems the maximum actuator positioning path (see
parameter ".2.5. total motion range") is shortened at the factory by
approx. 2 mm. In the case of on-site mounting of the DC actuator
drive the position range limit must be set by the customer.
Especially in the case of large moved masses, please ensure that the
actuator does not come to a standstill at once. The positioning range
must be reduced accordingly.
The set values are always in relation to the set center.
The positioning path must entered for both sides (right/left) of the
center position in parameter .2.6. and .2.7. of the positioning range.
These position range limits must not be used as safeguards for
persons or appliances. For the safety of persons or appliances the
end position limits must be fitted with additional limit switches or a
suitable mechanical stop.
.2.8. alarm limit %
If necessary a range may be defined that, once exceeded, triggers
the output of a limit alarm. The value is entered in % and is in relation
to the two parameters ".2.6. positio" and ".2.7. positionrange
-". If the actuator exceeds this calculated value the "end position ex-
ceeded" message is output. The end position early warning is always
in relation to the center of the positioning range. The warning is out-
put for both sides (positive and negative).
Transfer rol-
ler







































































