





























U Page 16
Digital controller RK 4004
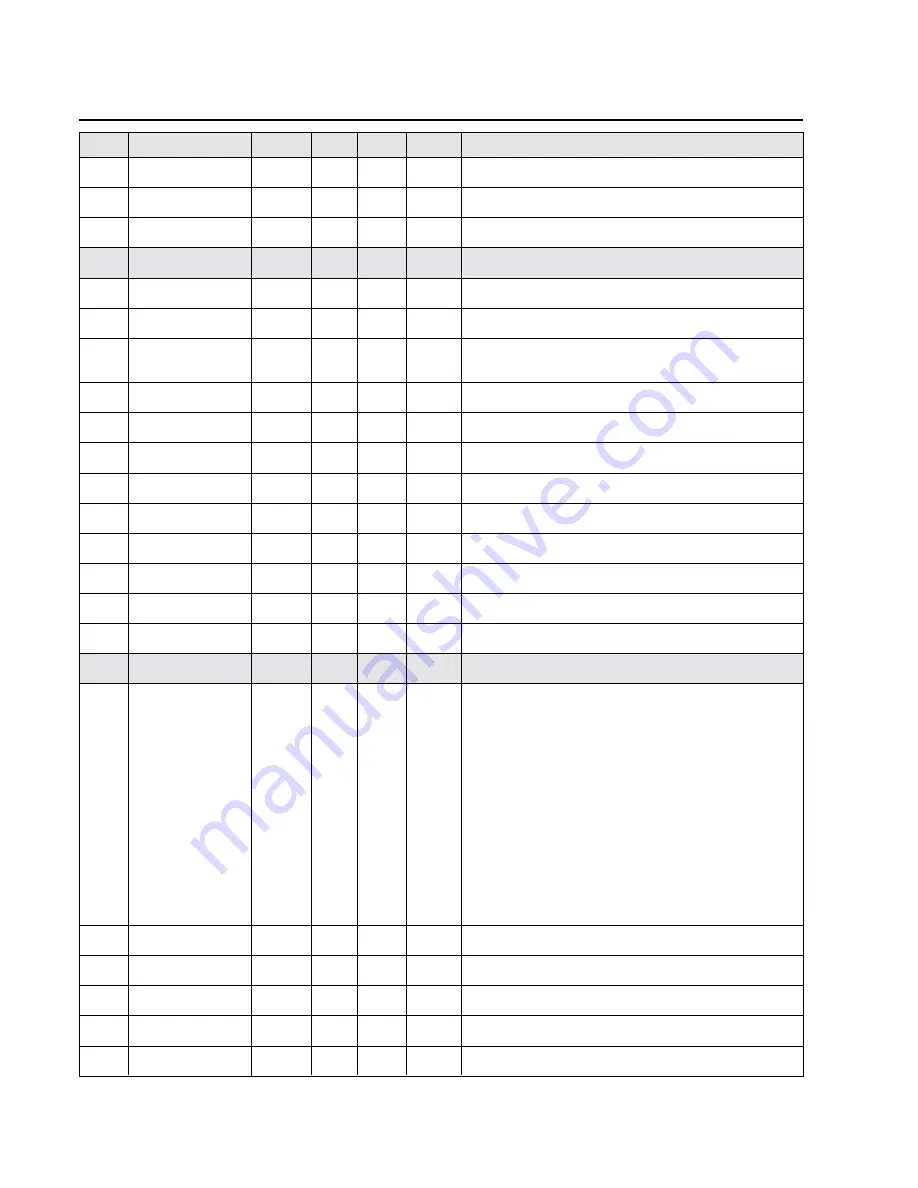
No.
Name
Default
Min.
Max.
Unit
Description
.5.2.
accel. time
0.0
0.1
10.0
sec.
Acceleration time
.5.3. •
I-PWM
Current I-PWM-value (display only)
.5.4.
reserved 54
not assigned at present
.5.5. •
current controller
Parameter title
.5.6.
cut-off current
8.0
0.0
10.0
A
Cut-off current of motor output stage
.5.7.
motorcurrent
1.0
0.0
7.0
A
Max. permissible nominal motor current
.5.8.
dyn. currentfactor
150
100
200
%
Dynamic motor current rise
Motor is overloaded briefly by the variable factor
.5.9.
therm. timeconst.
60
1
200
sec.
Thermal time constant for brief motor current excess
.6.0. •
limited current
-
-7.00
7.00
A
Current permissible motor current
.6.1. •
act. current
-
-20.00
20.00
A
Actual measured motor current
.6.2.
current_P
2.6
0.0
100.0
P component for current controller
.6.3.
current_I
0.4
0.0
50.0
I component for current controller
.6.4. •
set current
Set motor current display
.6.5.
reserved 65
not assigned at present
.6.6.
reserved 66
not assigned at present
.6.7.
reserved 67
not assigned at present
.6.8. •
diagnostics
Parameter title
.6.9. •
system error
xx
Error display
1
= supply voltage < 20 V DC
2
= supply voltage > 30 V DC
3
= cut-off current exceeded
4
= heat sink temperature > 70 °C
5
= incremental encoder defective
6
= incremental encoder inverted
7
= no message from right sensor
8
= no message from left sensor
10 = motor line interrupted
11 = motor blocked
12 = motor output stage defective
13 = motor blocked
14 = reference switch has several switching points
15 = end pos. proximity switches incorrectly configured
16 = external voltage output overloaded
.7.0.
reserved 70
not assigned at present
.7.1.
reserved 71
not assigned at present
.7.2. •
running time meter
x
h
Running time meter
.7.3. •
supplyvoltage 24DC
xx.x
V
Operating voltage
.7.4. •
temperature case
xx
o
C
Heat sink temperature







































































