





























Positioning User Manual
41
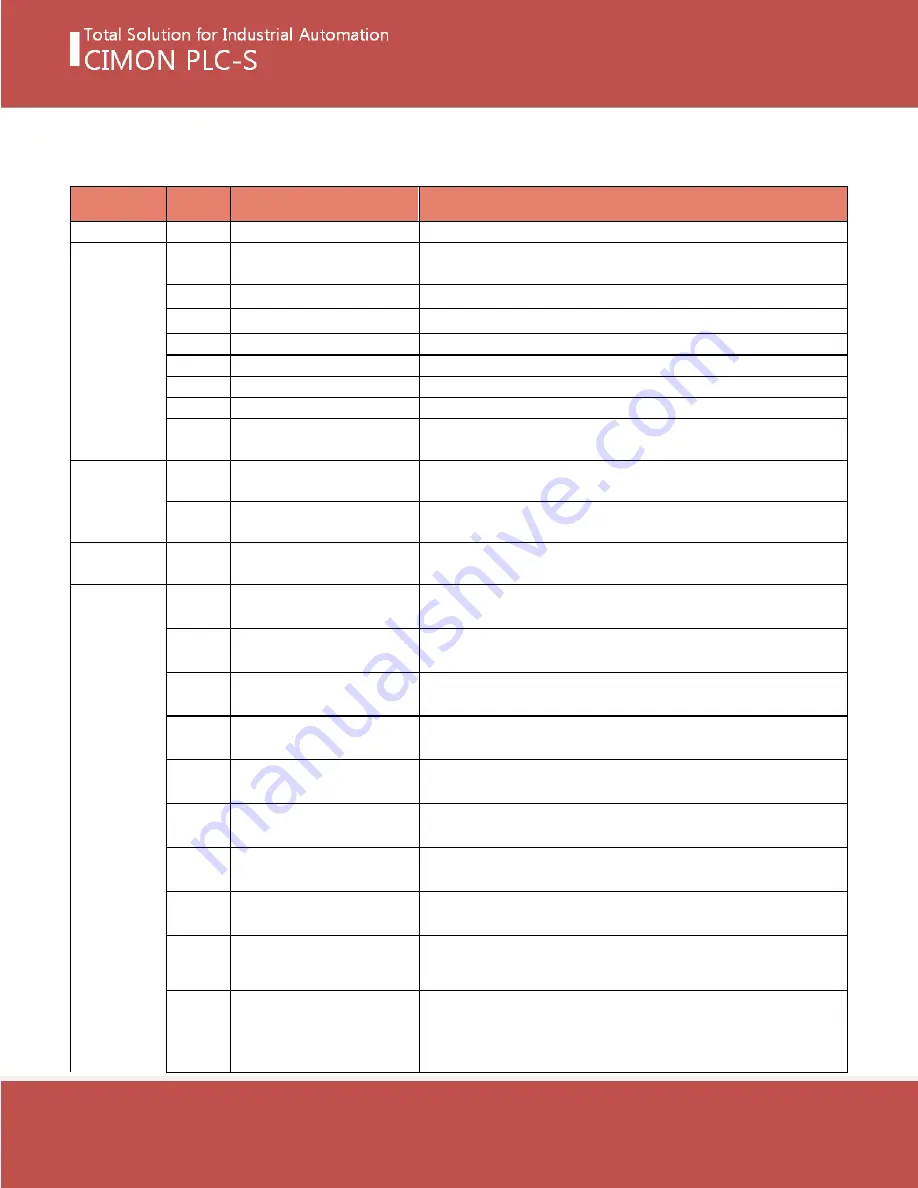
1.9
Error Code
Category
Code Error Name
Description
-
0
No error
Normal operation status
Common
101
Disable Y-axis
When using the built-in High Speed Counter function of
PLC-S, Y-axis is disabled to use the pulse output.
102
Emergency Stop
Stop by the emergency stop command.
104
H/W upper limit
Exceeds position limit (H/W upper limit signal detected)
105
H/W lower limit
Exceeds position limit (H/W lower limit signal detected)
106
Operation speed error
Operational speed exceeds the speed limit.
154
S/W upper limit
Exceeds S/W position upper limit.
155
S/W lower limit
Exceeds S/W position lower limit.
156
Emergency Stop Input
Positioning control is denied.
(Emergency stop signal is ON).
OPR
202
OPR required
Home position (OPR) is not decided yet.
Cannot execute positioning control.
203
No DOG signal
Exceeds DOG signal input time limit (30 seconds) during
OPR operation.
Manual
300
JOG/Inching error
JOG/Inching command/input is executed while other
positioning control is in operation.
Positioning
503
Operation speed error
This error occurs when the operation speed for positioning
control is not entered.
519
Interpolation axis in
operation
This error occurs when the specified interpolation axis is
controlling another positioning.
521
Wrong interpolation axis
This error occurs when the unsupported axis is executed
for the interpolation operation.
543
Positioning number error
When a wrong number other than 1
~
30 and 9001
~
9004 is
entered for the positioning start number.
545
Loop repetition count error
When the input range for the repetition count of the loop
is exceeded.
547
Loop number setting error
This error occurs if the maximum number of loops that can
be run within the loop has exceeded the limit.
548
Loop command error
When the loop data buffer is lost due to internal operation
error of positioning.
549
Unsupported control
command
When an unsupported command code is entered for the
positioning control command.
550
Position address
change error
A command to forcefully change current position address is
issued while the axis is in operation.
551
Speed change error
A command to change current speed is issued while the
axis stops or dwells. (A command to change current speed
is possible during a phase of acceleration, deceleration or
constant speed).







































































