























Positioning User Manual
51
c)
Write a Scan Program
Write a scan program as follows.
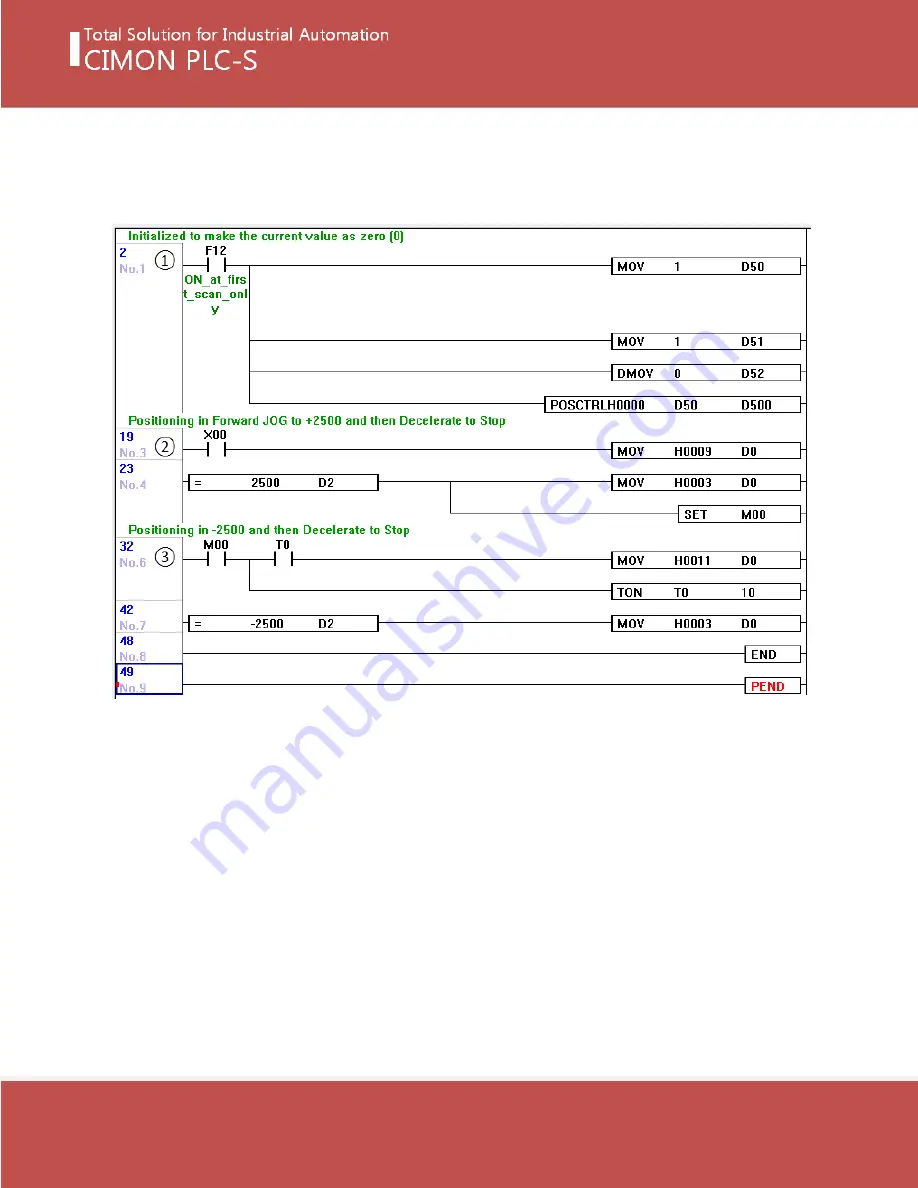
①
Initialize to make the current position value as zero (0).
Please refer to Section 1.8.2 ‘POSCTRL.’
②
Positioning in Forward JOG to +2500 and then decelerate to stop.
D0 is a control flag and is composed of 16Bit.
MOV H0009 D0: Enable operation, Forward JOG control.
D2 displays current position. If the value of D2 is 2500, it decelerates to stop and set M00.
③
It takes 1000 msec to decelerate to stop.
After a delay of 1 second, Backward JOG control operates.
If the value of D2 is -2500, it will decelerate to stop.