





























Service Procedures
PreciseFlex™ DDR Collaborative Robots
P/N: PFD0-DI-00010, Rev 5.0.0, April 9, 2022
94
Copyright © 2022, Brooks Automation, Inc.
operate properly. The limits are 6,000 rpm and 4000 rad/s
2
. Even at 100% speeds the robot joints
normally do not move faster than about 2,000 rpm and 1300 rad/s
2
. However, if the robot is shocked
during shipping, it is possible the standby operation acceleration error limit may be exceeded. This can
generate an encoder operation error that will prevent the robot from homing after power up.
This error will be displayed in the Operator Window of the Web Interface as “Encoder Operation Error”
Robot 1: <axis number>.
Assuming the robot has not been damaged by the shipping process, this error can be reset by the
following procedure:
1.
Access the Web Operator Interface to the robot with either “Maintenance” or
“Administrator” privileges.
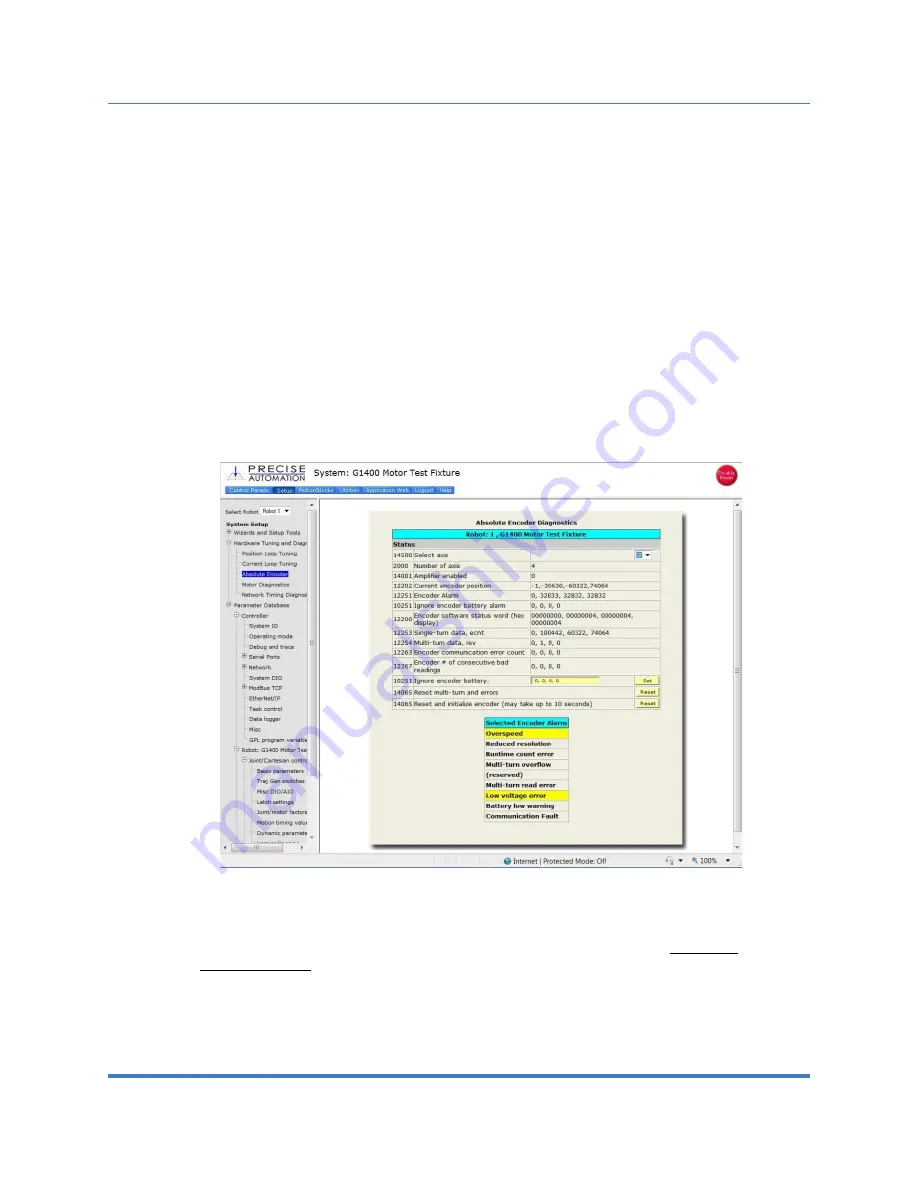
2.
In the “Setup” menu, select “Hardware Tuning and Diagnostics”, then select
“Absolute Encoder”. You should see a screen similar to that shown below.
3.
In the pull-down menu at the top right of the screen, select the robot axis that was
associated with the error and check to see if the Overspeed panel is yellow. This
indicates an overspeed error during encoder standby mode due to shock or
vibration. This error can be reset by selecting the reset button next to “
Reset and
initialize encoder
”. This button resets error flags, but does NOT reset the encoder
counters. The robot can then be homed normally.
4.
For cases where the encoder operation error was triggered by shipping vibration, IN
MOST CASES the encoder will not have lost any position data. However, after
homing the robot it is a good idea to move the robot to the calibration position (using