





























82
Workshop Manual
Smart Tachograph EFAS-4.10/4.11
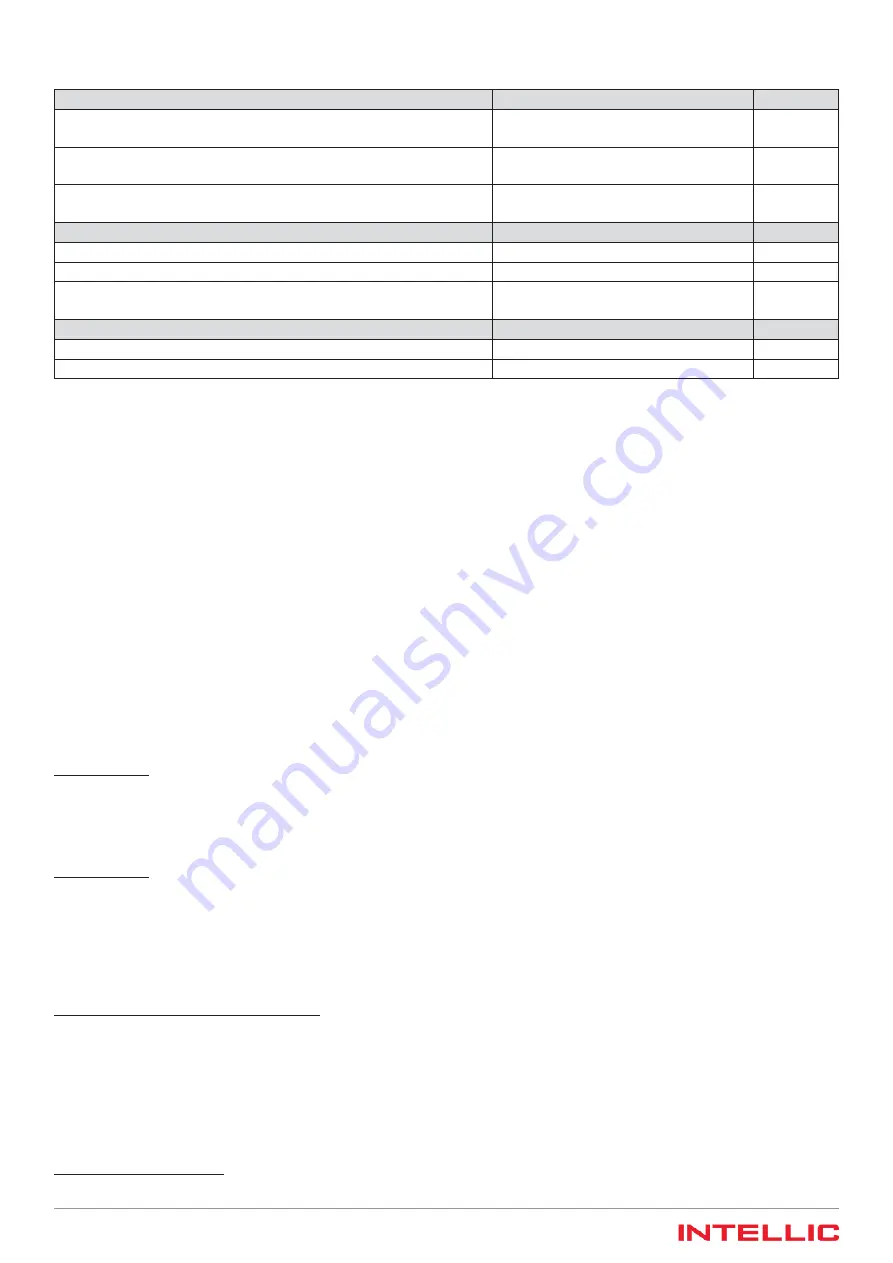
Table 20 — Manufacturer-specific CAN parameters
CAN A / CAN C parameters
Ranges of values
RDI hex
Selects the CAN main vehicle bus
CAN main vehicle bus on connector A
CAN main vehicle bus on connector C
FD6E
Basic configuration, A bus (bit rate and ID length setting)
ON/OFF, 11/29 bit
250 kbps or 500 kbps
FD01
Basic configuration, C bus (bit rate and ID length setting)
32
ON/OFF, 11/29 bit
250 kbps or 500 kbps
FD02
Parameter, main vehicle bus
Ranges of values
RDI hex
Protocol code for selection of the standard tachograph protocol
0 to 250
(ISO 16844 or variant code)
FD52
Protocol code for selection of the diagnostics protocol
0 to 250
(ISO 14229 or variant code)
FD53
Parameter, expansion bus
Ranges of values
RDI hex
Synchronization settings (SJW value)
33
1 TQ to 4 TQ
FD54
Bit sampling instant
33
80% to 88%
FD55
CAN bus enable / disable
The CAN bus on the A connector is enabled or disabled with the parameter RDI=0xFD01. If the CAN bus interface of the tacho-
graph is not used in the vehicle, then the CAN bus function should be disabled in the tachograph. Otherwise the tachograph
stores an error code (DTC) in the error memory if no communication partner is detected on the CAN bus.
CAN protocol selection
The selection of the protocol includes the setting of the data transmission rate (e.g. 250 kbps or 500 kbps, the length of the
message identifier (11 bits or 29 bits), and if applicable the selection of specific (vehicle manufacturer specific) communication
protocols for the transmission of standard messages and diagnostic functions. The most widely used protocol for messages is
based on the ISO 16844 standard, and for diagnostics on the ISO 14229 standard. If the protocol selection is changed, it should
be noted that, unlike most of the other parameters, the new parameter settings do not take immediate effect. Changing the
CAN protocol setting always requires the device to be restarted, i.e. a change to standby mode after turning off the ignition and
then restarting by turning on the ignition, or by rebooting with the reset function, as supported by
EFAS Service Tool
.
TCO2, TCO3 activation / deactivation
To activate the TCO2 and TCO3 message, the Volvo protocol must be selected in the parameter list
“Select Standard
protocol”
(0xFD52).
The TCO2 and / or TCO3 message can then be activated or deactivated via parameter 0xFDC2 (default: deactivated). Bit 5
(0x00000010) must be set to activate the TCO2 message. The TCO3 message must be activated via bit 6 (0x00000020). If the
TCO2 message is activated, this is sent cyclically every 60 seconds. The TCO3 message is sent every 10 seconds after activation.
TCO2 message:
y
Identification Driver 1
y
Preferred language
y
Next calibration date
y
W Factor
TCO3 message:
y
Continuous driving time of driver 1
y
Cumulative break time of driver 1
y
Current duration of the selected activity of driver 1
y
Status
y
Warning at end of driver card life of driver 1
y
Latest date for legal download of driver card data from driver 1
Remaining driving and rest times DRTD1/2
The parameters for the remaining travel and rest times (RDI=xFDC2) are transmitted with a transmission rate = 10 s.
13.2
Serial interfaces D7 and D8
The D connector of the EFAS tachograph has two bidirectional serial ports that can be used for different purposes.
The serial port on pin D8 is pre-configured as an information interface with a 10 V level, but it can alternatively be set up and
used as a diagnostic interface.
32 Hardware typical possible values at data rates of 250 and 500kbps
33 These values are not normally changed.
Содержание Intellic EFAS-4.10
Страница 1: ...Powered by Workshop Manual Smart Tachograph EFAS 4 10 4 11 ...
Страница 2: ......
Страница 4: ......
Страница 6: ......







































































