





























79
Workshop Manual
Smart Tachograph EFAS-4.10/4.11
Chapter 13 Interfaces
13.1
CAN bus
The following chapters provide an overview of the various CAN interfaces at the A and C plug connectors, the types of data
transfer possible via CAN bus and relevant CAN parameters.
13.1.1
Overview
The EFAS tachograph has two independent CAN interfaces. One CAN bus (the main vehicle bus) is intended for the exchange
of data with an instrument panel or an electronic tachometer, as well as for the connection of diagnostic devices. An additional
CAN bus (expansion bus) can be used for connecting an additional remote data download unit. For further information
regarding the connection of a communications device, please refer to the corresponding handbook and/or the installation
instructions. In general, the CAN bus on connector A is used as the main vehicle bus and the CAN bus on connector C is used as
the expansion bus. A reversed configuration (main vehicle bus on C) is required in vehicles from the manufacturer SCANIA, for
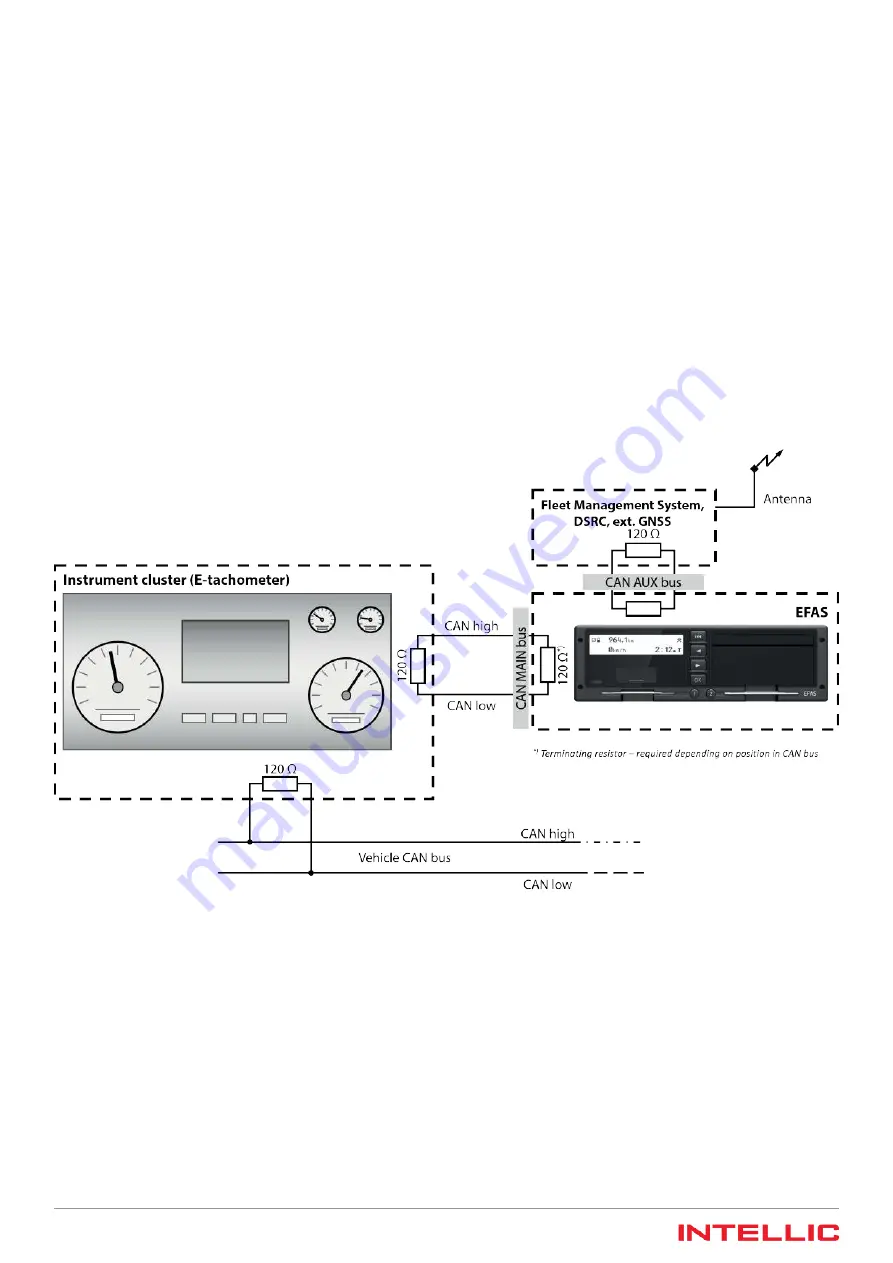
example. The following diagram shows a schematic depiction of the CAN bus connection between an instrument panel and the
EFAS tachograph, as well as the connection of a remote data download device. In this case the data between the tachograph
and other control devices on the CAN bus will be forwarded by the instrument cluster. At other vehicles the tachograph can also
connected directly to the vehicle CAN bus.
Figure 66 — CAN bus connection
13.1.2
CAN bus terminating resistors
If the recording equipment is situated at an endpoint on the CAN bus network, or if only a point-to-point connection between
two control devices is required, then a terminating resistor must be present on the EFAS CAN connector. You can acquire speci-
fications as to the topology of the bus system from the respective vehicle manufacturer.
With EFAS, 120 Ω terminating resistors are provided for both CAN bus interfaces, so you have the option to switch in each of the
two CAN terminals.
If the terminating resistors are not set correctly, sporadic or permanent disturbances of the CAN bus may occur and the function
of the automatic parameter detection may be affected.
The terminating resistors must therefore be set correctly before all other CAN bus settings, so that a value of 60 Ohm results
between CAN_H and CAN_L.
Содержание Intellic EFAS-4.10
Страница 1: ...Powered by Workshop Manual Smart Tachograph EFAS 4 10 4 11 ...
Страница 2: ......
Страница 4: ......
Страница 6: ......







































































