





























64
AXOR Industries
Service Manual
NanoMack
®
ver.1 rev.11/'19
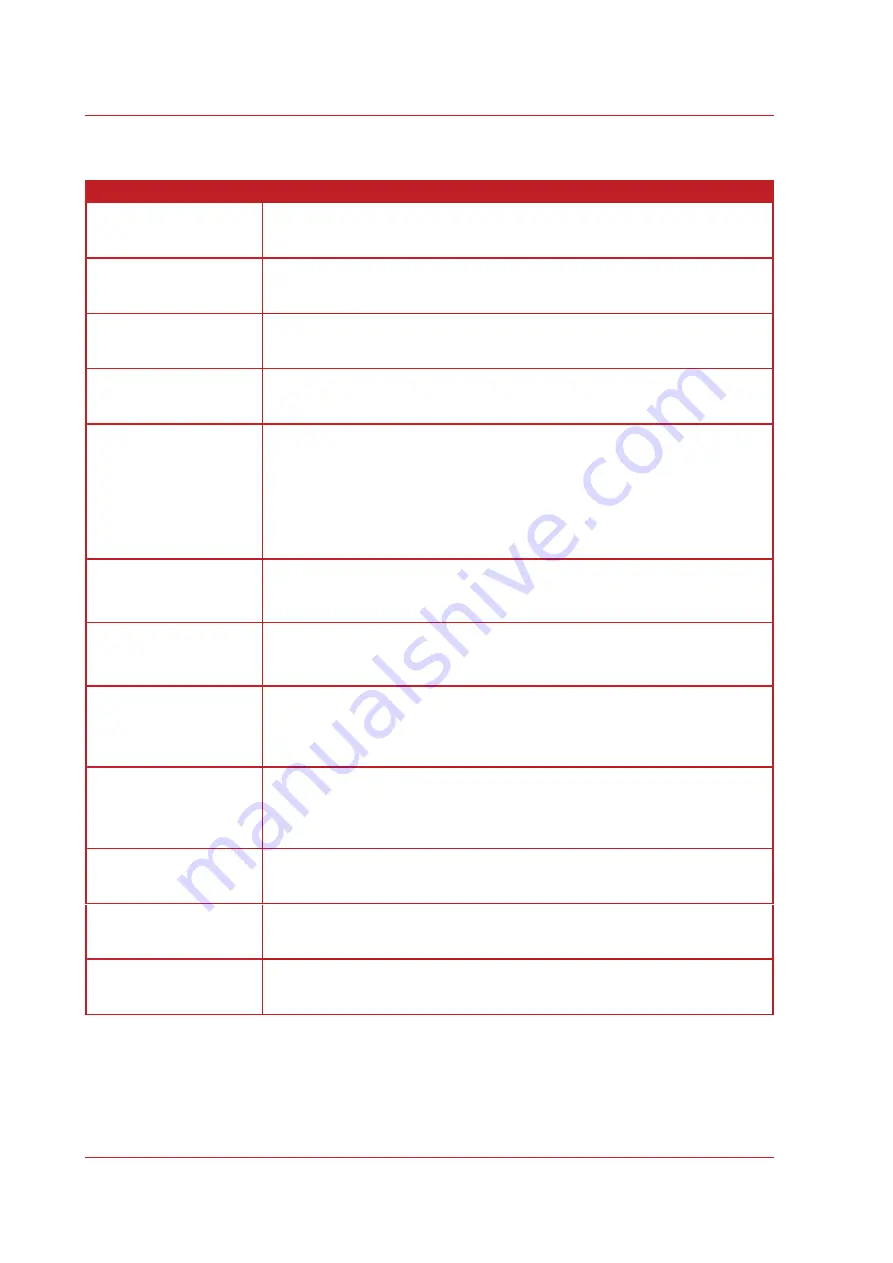
4.1 Operative Modes
CONTROL
DESCRIPTION
ANALOG SPEED
It is
speed piloting
utilising an analogue reference.
DIGITAL SPEED
It is
speed piloting
utilising a digital reference.
ANALOG TORQUE
It is
torque piloting
utilising an analogue reference.
DIGITAL TORQUE
It is
torque piloting
utilising a digital reference.
POSITION MODE
The positioner can be managed via hardware (by using the digital inputs
appropriately configured) or via USB (by using the Speeder One interface).
It supports 32 programmable position profiles, a single task or a
sequence of tasks are permitted.
The Homing Procedure is implemented. It uses the signal coming from
the homing sensor and eventually the zero signal of the encoder.
GEARING
It is possible to pilot the drive with the quadrature signals of an emulated
encoder from a Master drive or with the quadrature signals of an
incremental encoder from a Master motor (
Electrical Axis
or
Gearing
).
PULSE/DIR MODE
It is possible to connect the drive to a motor piloting it with the CLOCK
and DIR signals: the DIR signal defines the clockwise/counter clockwise
rotation, while the CLOCK signal defines the speed rotation.
CANOPEN
It can be configured and controlled using CanBus. It supports the following
Can Open protocols:
• Part of the DS301-V4.02
• Part of the DSP402-V2.0
CW/CCW
It is possible to connect the drive to a motor piloting it with the CLOCK
and DIR signals: if pulses arrive at the CLOCK input, the motor rotates
clockwise (CW); while if pulses arrive at the DIR input, the motor rotates
counter clockwise (CCW).
SQUARE WAVE
PERIOD
The motor is piloted with a “square wave” signal.
This is useful for adjustments of the speed loop.
ANALOG to
POSITION
The motor moves between two programmable positions corresponding
the Min. and Max. voltages at the dedicated pins.
DIGITAL POSITION
The motor moves between two digital positions.
The drive
supports the following operative modes:







































































