





























105
AXOR Industries
Service Manual
NanoMack
®
ver.1 rev.11/'19
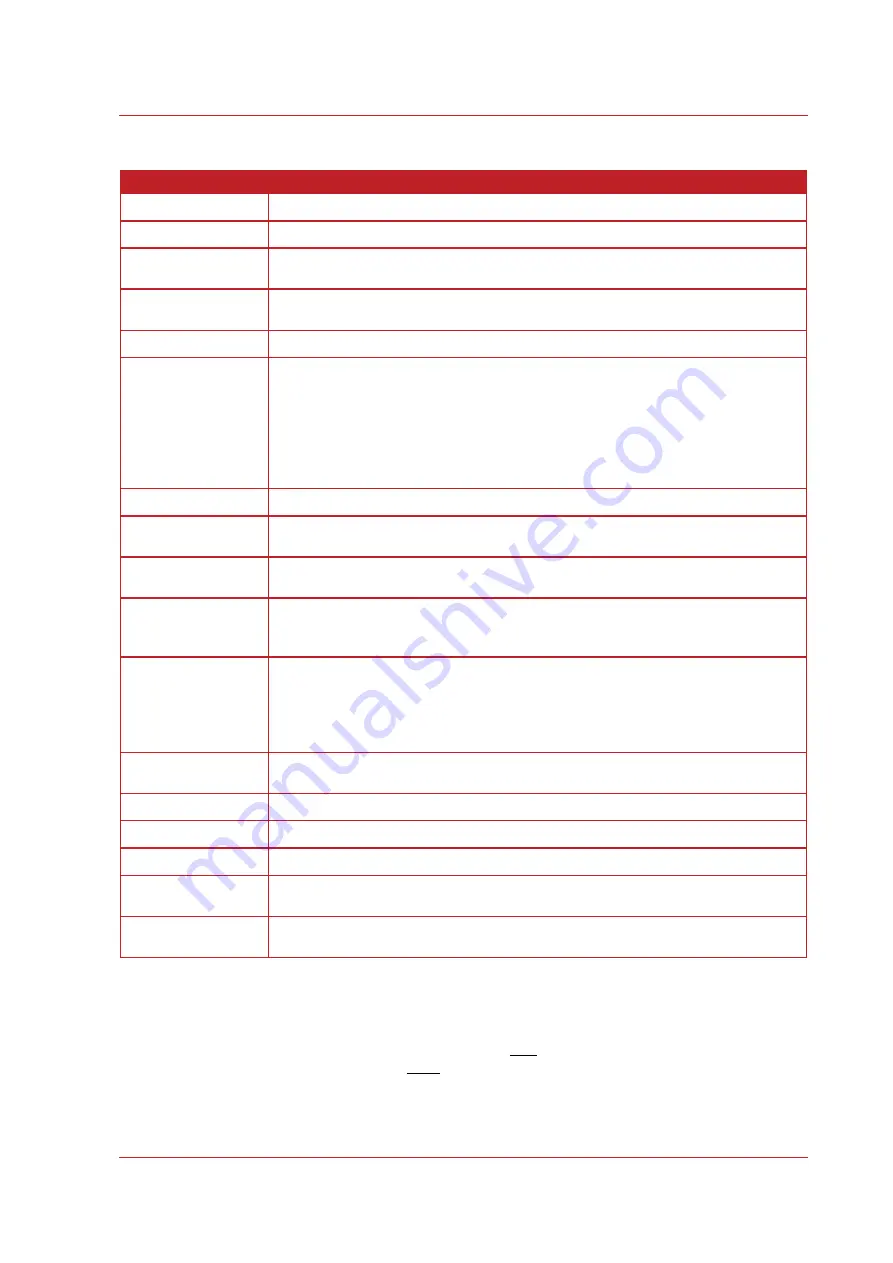
5.8 Digital I/0 window
FUNCTION
INPUT DESCRIPTION
0:Off
No function.
1:Ref-On
Enable motor rotation.
2:PStop (NC)
Positive limit switch normally closed.
A low logical signal on this input disables the "CW" rotation of the motor.
3:NStop (NC)
Negative limit switch normally closed.
A low logical signal on this input disables the "CCW" rotation of the motor.
4:Brake
Manual command for the digital output setted as "Out Brake"
5:Start Jog
7:Start Jog
It enables a movement having the following parameters:
• Acceleration time that is equal to the homing acceleration time;
• Speed (in rpm) equal to the value set in the auxiliary variable;
• Target equal to the positive extreme (PSTOP software) of the axis if the
speed is positive, or equal to the negative extreme (NSTOP software) of the
axis if the speed is negative;
• Deceleration time that is equal to the homing acceleration time.
6:Homing Sensor
Homing sensor.
8:Start Task Num
Start the task set by the auxiliary variable. There is no possibility of blending
with this function.
9:Start Task I/O
Start the task set by the digital inputs. There is not possibility of blending with
this function.
10:Start Sequence
Start a sequence of tasks. The first task is set by the digital inputs, while the
next tasks are set by using the "Next Profile" parameter associated to each
task. At the end of each task the following automatically starts.
11:Start Next
Start a sequence of tasks. The first task is set by the digital inputs, while the
next tasks are set by using the "Next Profile" parameter associated to each
task. At the end of each task the motor stops, the user has to click the task
button (clicking twice: disabling and enabling) in order to start the next task
of the sequence.
12:P+N Stop
Positive and negative limit switch. A low logical signal on this input disables
the CW or CCW rotation of the motor.
13:Start Homing
Start the homing procedure.
14:Alarm Reset
Reset the "resettable" alarms.
15:Speed Inv.
Inversion of the motor rotation.
16:TouchProbe1
The touch probe external input signals for capture the position value of the
encoder.
17:TouchProbe2
The touch probe external input signals for capture the position value of the
encoder.
The
D.IN1
...
D.IN4
inputs can be set to enable the following functions:
Very Important Notes:
•
Before changing the function on a programmable input make sure that the function is disabled.
For example:
The “Start Homing” function is not active with a low signal on the dedicated input. The
“Pstop” function is not active with a high signal on the dedicated input.
•
Remember to save to the EEPROM all settings made on the programmable digital input in
order to make them permanent.







































































