





























C
OMMAND
D
ATA
F
ORMAT
SD4840EK User Manual
ADVANCED MICRO CONTROLS INC.
76
Input Data Format (continued)
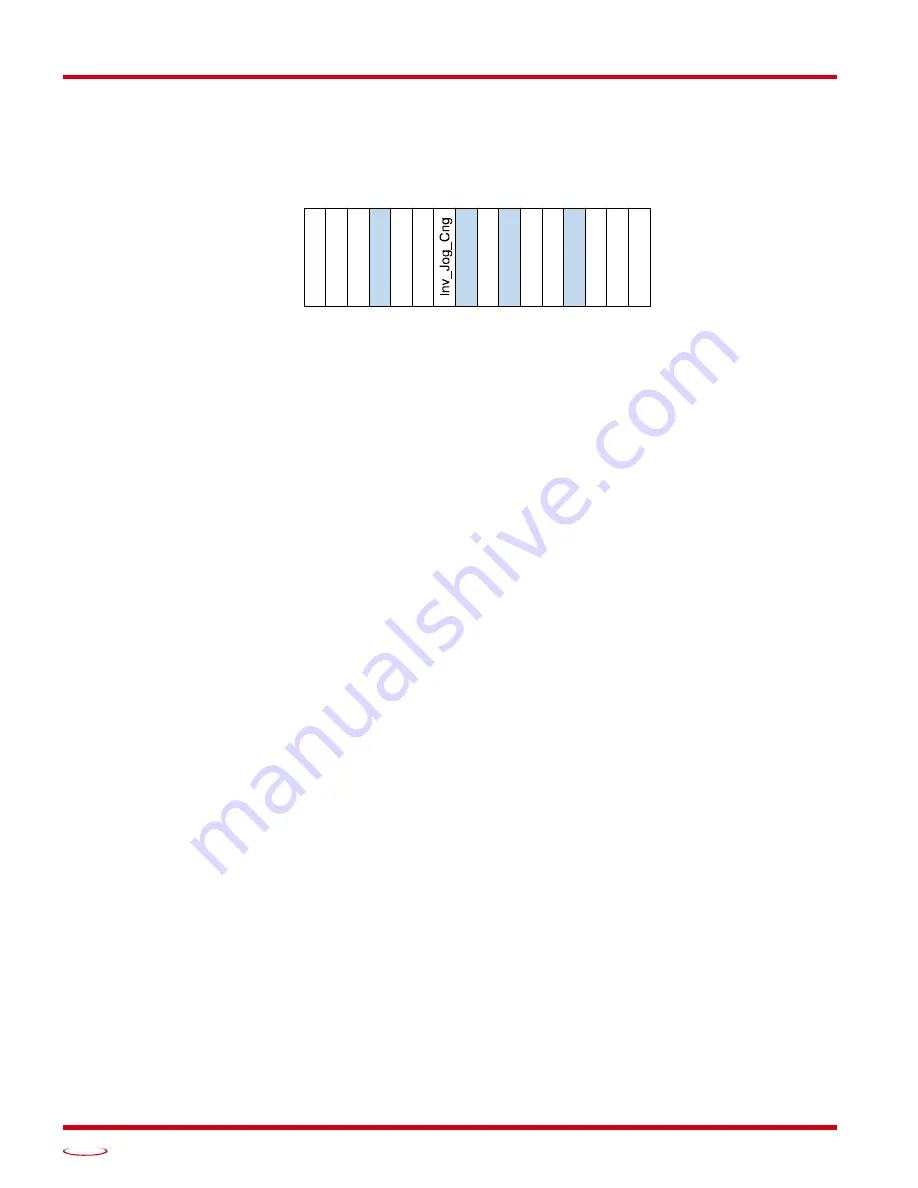
STATUS_word1 Format
Figure R6.5 Command Mode:
STATUS_word
1 Format
Bit 15: Drive_Is_Enabled –
Set to “1” when the motor driver section of the SD4840EK is enabled and cur-
rent is available to the motor. Set to “0” when the motor driver section is disabled. If this bit is set to
“1”, the motor current remains present when an E-Stop input is active. This bit will remain set if the
motor current has been removed because motion is not occurring and the Idle Current Reduction is
programmed to its 0% setting. Motor current is removed if there is a Driver_Fault (Bit 7 below)
regardless of the state of this bit.
Bit 14: Stall_Detected –
Set to “1” when a motor stall has been detected.
Bit 13: OUT1_State –
Present actual state of Output 1. When this bit is set to “1”, the output is in its on state
and conducts current.
Bit 12: Reserved Bit –
Will always equal zero.
Bit 11: Heartbeat_Bit –
This bit will change state approximately every 500 milliseconds. Monitor this bit to
verify that the unit and network connection are operating correctly.
Bit 10: Limit_Condition –
This bit is set if an End Limit Switch is reached during a move. This bit will be
reset when the Limit Switch changes from its active to inactive state, or when a Reset Errors Com-
mand is issued.
Bit 9: Invalid_Jog_Change –
Set during a Jog Move if parameters are changed to invalid values. Parame-
ters that can be changed during a Jog Move are Programmed Speed, Acceleration, and Deceleration.
While in Electronic Gearing mode, this bit is also set if the Numerator or Denominator are set out-
side their ranges of 1 to 255.
Bit 8: Reserved –
Will always equal zero.
Bit 7: Driver_Fault –
If the driver section of the SD4840EK is enabled, this bit will be a “1” during a Over
temperature Fault, a Short Circuit Fault, or when the Interlock Jumper is missing. This fault can be
cleared by issuing a
programming block with the Clear_Driver_Fault bit,
(CMD_word1, bit 10) set to “1”. For additional information, see
Notes on Clearing a Driver Fault
on page 77. Note that the driver fault bit is set at power up if the interlock is missing and the driver is
immediately enabled.
Bit 6: Reserved –
Will always equal zero.
Bit 5: SafeOp –
Set to “1” when the network is in Safe_Op mode. Moves cannot be commanded while in
this mode. Reset to “0” when the network is in Operational mode. Moves can be commanded when
in Op mode.
Bit 4:
Temperature_Above_90C –
This bit is set to “1” when the processor internal temperature exceeds
90°C. At this point, the heatsink temperature is typically near 83°C. If this bit trips often and you
want to lower the operating temperature of the module, consider changing installing a fan to force
additional airflow through the SD4840EK.
Bit 3: Reserved –
Will always equal zero.
STATUS_word1
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Dri
v
e_
Enab
led
Sta
ll_Det
ec
ted
Cm
d
_Ack
T
e
mp_90
°C
Saf
eOp
0
0
0
0
IN
3_Act
iv
e
IN
2_Act
iv
e
IN
1_Act
iv
e
Dr
iv
er_F
au
lt
Li
mit
_Cond
it
ion
Heart
bea
t_
Bi
t
Содержание SD4840EK
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S310...
Страница 6: ...TABLE OF CONTENTS SD4840EK User Manual ADVANCED MICRO CONTROLS INC 6 Notes...
Страница 38: ...MOVE PROFILES SD4840EK User Manual ADVANCED MICRO CONTROLS INC 38 Notes...
Страница 48: ...CALCULATING MOVE PROFILES SD4840EK User Manual ADVANCED MICRO CONTROLS INC 48 Notes...
Страница 78: ...COMMAND DATA FORMAT SD4840EK User Manual ADVANCED MICRO CONTROLS INC 78 Notes...
Страница 94: ...INSTALLING THE SD4840EK SD4840EK User Manual ADVANCED MICRO CONTROLS INC 94 Notes...
Страница 104: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...







































































