





























20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com
Networked Indexer/Driver User Manual
C
OMMAND
M
ODE
D
ATA
F
ORMAT
69
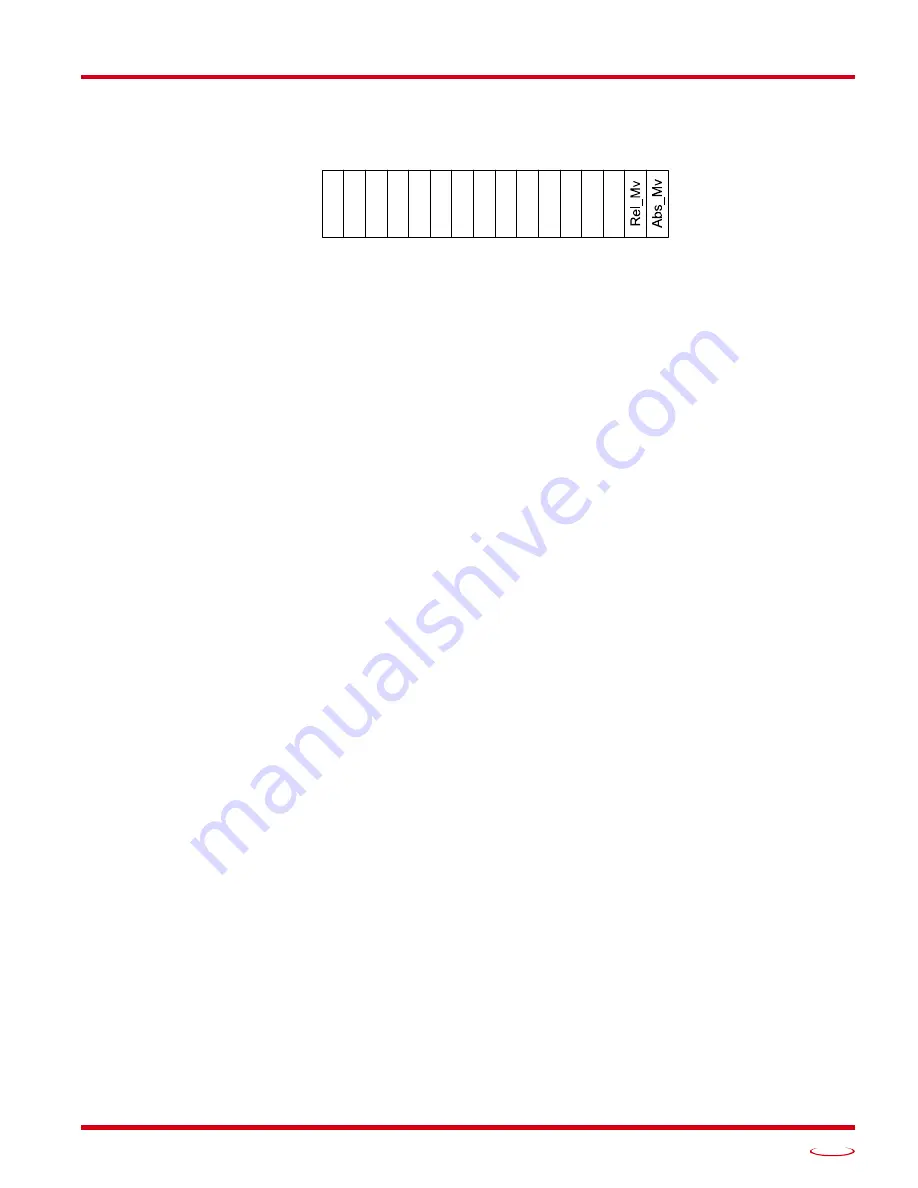
Command Word 0
Figure R7.2 Command Word 0 Format
Bit 15: Mode_Select –
“1” for Configuration Mode Programming “0” for Command Mode Programming.
A factory default SD17060E2 or SD312045E2 powers up in Command Mode and shows a configu-
ration error. (Hexadecimal value of 6408h.) The Networked Driver will not power the motor or
accept commands until a valid configuration is written to it.
Bit 14: Preset_Encoder –
When set to “1” the Networked Driver will preset the Encoder Position to the
value stored in Output Words 2 and 3.
Bit 13: Run_Assembled_Move –
When set to “1” the Networked Driver will run the Assembled Move
already stored in memory.
Assembled_Move_Type – Command Word 1, Bit 9:
This bit determines the type of move
that is run. When this bit equals “0”, a Blend Move is run. When this bit equals “1”, a Dwell
Move is run. When starting a Dwell Move, the Dwell Time is programmed in word 9 of the
Command Data. The value is programmed in milliseconds and can range from 0 to 65,536.
Reverse_Blend_Direction – Command Word 1, Bit 4:
This bit is used to determine the direc-
tion that the Blend Move will be run in. When this bit equals “0”, the Blend Move runs in the
clockwise direction. When this bit equals “1”, the Blend Move is run in the counter-clockwise
direction.
Bits 11 & 12: Program_Assembled & Read_Assembled_Data –
These bits are used to program the seg-
ments of an Assembled Move before the move can be run. Their use is explained in the
section of this manual starting on page 37.
Bit 10: Reset_Errors –
When set to “1” the Networked Driver will clear all existing errors, reset the
Move_Complete
bit, and attempt to use the present data to run a new command.
Bit 9:
Preset_Position –
When set to “1” the Networked Driver will preset the Motor Position to the value
stored in Output Words 2 and 3 and reset the Move_Complete bit in the Network Input Data.
Bit 8:
Jog_CCW –
When set to “1” the Networked Driver will run a Jog Move in the counter-clockwise
direction. The full explanation of a
can be found starting on page 29.
Registration_Move – Command Word 1, Bit 7:
When this bit equals “0”, and a Jog Move
command is issued, it will run as a standard Jog Move. When this bit equals “1” and a
Jog Move command is issued, the move will run as a Registration Move.
Enable_Electronic_Gearing – Command Word 1, Bit 6:
When this bit equals “1” the Net-
worked Driver will switch its operation to
mode as described on page 41.
While in this mode, the two Jog Move bits are used to enable motor motion. One of these two
bits must equal “1” before the motor will follow a change in encoder position.
Axis Follower Mode – Command Word 1, Bits 12 and 14:
If either of these bits equal “1”
when the Registration_Move bit equals “0”, the Networked Driver will enter its Axis Follower
Mode when the Jog Move bit is set to “1”.
Command Word 0
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
MO
DE
Prst
_Enc
Run_
AM
ov
Rd
_A
D
at
a
Prg
_A
ss
m
RSe
t_
Err
Pr
st
_
P
os
Jog_
CCW
Jo
g_
C
W
Hom
e_CCW
Ho
me_CW
I-
S
to
p
Re
sm
_M
v
Ho
ld
_
M
v
Содержание SD17060E2
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S172 E2 Technology E2 Technology...
Страница 10: ...ABOUT THIS MANUAL Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 10 Notes...
Страница 22: ...UL CUL RECOGNIZED INSTALLATIONS Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 22 Notes...
Страница 54: ...CALCULATING MOVE PROFILES Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 54 Notes...
Страница 88: ...COMMAND MODE DATA FORMAT Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 88 Notes...
Страница 106: ...INSTALLING AN AMCI NETWORKED DRIVER Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 106 Notes...
Страница 130: ...ETHERNET IP EXPLICIT MESSAGING Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 130 Notes...
Страница 134: ...MODBUS TCP CONFIGURATION Networked Indexer Driver User Manual ADVANCED MICRO CONTROLS INC 134 Notes...
Страница 144: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC...







































































