





























Robot position when attaching the screws in area 1
Note
Action
Jog the robot to the specified position:
•
Axis 1: no significance as long as
the robot is fitted to the foundation.
•
Axis 2: +48°
•
Axis 3: 0°
•
Axis 4: 0°
•
Axis 5: 0°
•
Axis 6: No significance.
1
DANGER
Turn off all:
•
electric power supply
•
hydraulic pressure supply
•
air pressure supply
to the robot, before entering the robot
working area.
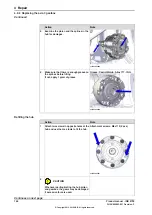
2
Refitting the axis-3 gearbox to parallel arm - screws in area 1
Note
Action
1
2
3
1
2
3
xx1500002974
Find area 1.
1
Attachment screws: M16x70 12.9
Gleitmo
Attach and secure the screws in area 1.
2
Tightening torque: 300 Nm
xx1500003114
Lower arm is hidden in this figure,
to get a better view.
Continues on next page
758
Product manual - IRB 8700
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.8.4 Replacing the axis-3 gearbox
Continued
Содержание IRC5 Compact
Страница 1: ...ROBOTICS Product manual IRB 8700 ...
Страница 2: ...Trace back information Workspace R18 1 version a12 Checked in 2018 03 27 Skribenta version 5 2 025 ...
Страница 16: ...This page is intentionally left blank ...
Страница 824: ...This page is intentionally left blank ...
Страница 838: ...This page is intentionally left blank ...
Страница 840: ...This page is intentionally left blank ...
Страница 846: ......
Страница 847: ......