



























Note
Action
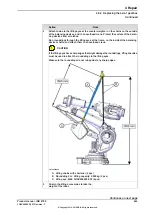
xx1700000931
Put down the arm system on the prepared
surface.
DANGER
DO NOT remove the lifting accessories
until it is tested that the arm system is
stable. Lower the lifting accessory a little,
while at the same time using force to test
if the arm system remains stable. If not,
adjust the position of the robots axes.
6
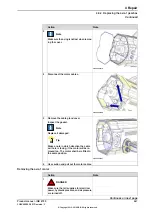
Remove the lifting accessories.
WARNING
The robot is likely to be mechanically un-
stable if not secured to the foundation. Test
if the robot is stable, before the lifting ac-
cessories are removed.
7
Removing the axis-1 gearbox
Note
Action
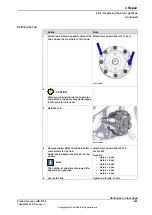
Lifting eye: M16 3HAC14457-4 (2 pcs)
Fit lifting eyes in opposite holes.
Note
Do not tighten the lifting eyes completely
against the gearbox. Leave a 5 mm gap, or
the sealing surface on the gearbox will be
damaged.
1
CAUTION
The gearbox weighs 150 kg.
All lifting accessories used must be sized
accordingly.
2
Attach the lifting accessories to the axis-1
gearbox.
3
Stretch the lifting accessory (chain) to take
the weight of the axis-1 gearbox.
4
Continues on next page
Product manual - IRB 8700
653
3HAC052853-001 Revision: F
© Copyright 2015-2018 ABB. All rights reserved.
4 Repair
4.8.2 Replacing the axis-1 gearbox
Continued
Содержание IRC5 Compact
Страница 1: ...ROBOTICS Product manual IRB 8700 ...
Страница 2: ...Trace back information Workspace R18 1 version a12 Checked in 2018 03 27 Skribenta version 5 2 025 ...
Страница 16: ...This page is intentionally left blank ...
Страница 824: ...This page is intentionally left blank ...
Страница 838: ...This page is intentionally left blank ...
Страница 840: ...This page is intentionally left blank ...
Страница 846: ......
Страница 847: ......