





























44
P
t
After the drive output 1-segment position
command, it will not wait for the completion of
motor positioning, and start the next position
command at once.
P
t
t2
After the drive output 1-segment position
command, it will not wait for the completion of
motor positioning, but pass the adjust time, and
then start the next position command. T2 is adjust
time. Refer to parameter P4-11.
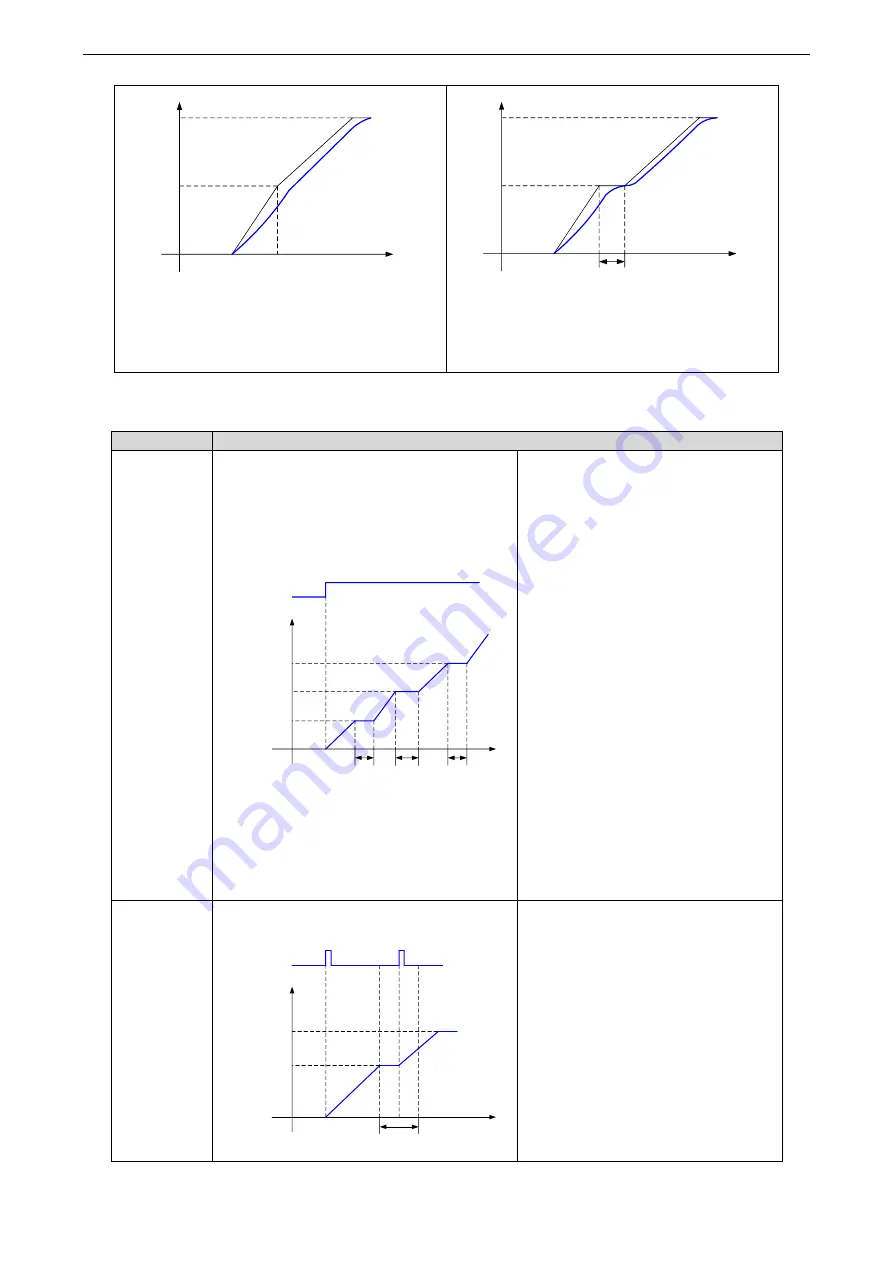
2. change step mode
n.xx□x
Description
0: Change
the step
when signal
is ON,
recycling
P
t
Segment 1
Segment 2
Segment 1
/CHGSTP
Signal status
t1
t2
t1
ON
OFF
t1=P4-16, t2=P4-23.
1. If the /CHGSTP signal is always on,
the servo unit will cycle the set
position segment all the time.
2. If the /CHGSTP signal is set to off
when executing a certain segment, the
servo will continue to complete the
execution of that segment without the
execution of the next segment.
3. In this mode, the step change signal
/CHGSTP is triggered at high level.
4. When the servo enable is off during
a certain section of operation, the
motor stops according to the servo off
shutdown mode. After the shutdown,
the positioning is invalid.
5. After each operation completion,
positioning completion and positioning
approach signal are all effective.
6. In this mode, the adjustment time of
each period is valid.
1: Change
the step at
the rising
edge of the
signal,
single-step
execution
P
/CHGSTP
Signal status
ON
OFF
t1
t
Take setting two segments as an
example, t1 = p4-16 in the figure.
1. Note that as shown in the figure, in
this mode, the set adjustment time
actually does not work. As long as the
previous position command has been
sent out, the next command will be
entered immediately when a new step
change signal arrives.
2. In this mode, the step change signal
/CHGSTP is triggered by rising edge.
3. After each operation completion,







































































