























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Note:
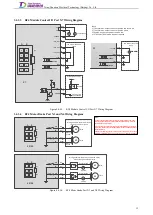
1. The RC4 universal servo products have "shaft control I/O", while robot dedicated servo products have no "shaft
control I/O". Universal products: CDRC4-AXXXX-XX-SX; Robot dedicated products: CDRC4-AXXXX-XX-VX.
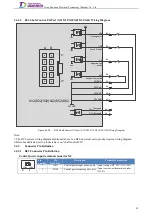
EtherCAT communication terminal connector X8~X9
Pin
number
Pin Definition
Description
Technical parameters
1
DP_PHY0_ TX+
Send data +
Standard RJ45 shielded terminal.
2
DP_PHY0_ TX-
Send data -
3
DP_PHY0_ RX+
Receive data +
4
——
——
5
——
——
6
DP_PHY0_ RX-
Receive data -
7
——
——
8
——
——
Serial port debugging terminal connector X10
Pin
number
Pin Definition
Description
Technical parameters
1
NC
Suspended and unconnected
——
2
RS485+
RS485
——
3
RS485-
RS485 signal-
——
4
NC
Suspended and unconnected
——
5
NC
Suspended and unconnected
——
6
GND
Signal ground
——
3.4.5.4
RC6 Connector Pin Definition
Control power input terminal connector X2
COM +24V
2
1
Pin
number
Pin
Definition
Description
Technical parameters
1
+24V
Control power input positive pole
Input voltage: DC 24V -15%/+20%
Input current (without motor brake):
DC 2A
2
COM
Control power input negative pole
Power supply input terminal connector X1
R S T
PE
B P
5
6
4
3
2
1
Pin
number
Pin Definition
Description
Technical parameters
1
PE
Protective ground
Input voltage: 220V 3AC ±15%
220V 1AC ±15%
Rated input current: 12Arms
2
R
Power supply R
3
S
Power supply S
4
T
Power supply T
5
B
Regenerative resistor
connection terminal B
6
P
Regenerative resistor
connection terminal P
Motor power output terminal connector X11/X21/X31/X41/X51/X61
U
V
W
PE
3 4
2
1
Pin
number
Pin Definition
Description
Technical parameters
1
W
Motor dynamic output phase W
——
2
V
Motor dynamic output phase V
3
U
Motor dynamic output phase U
4
PE
Protective ground
Motor brake output terminal connector X3/X6
A B
3
1
Pin
number
Pin
Definition
Description
Technical parameters
A1
BK+
Positive output of motor brake J3/J6
Maximum output current: 1Arms
Note:
Brake positive pole and
negative pole short circuit can
A2
BK-
Negative output of motor brake J3/J6
B1
BK+
Positive output of motor brake J2/J4
1
6
8
1
8
1
26
Summary of Contents for EtherCAT CoolDrive RC Series
Page 1: ...Updated on Update summary Updated version Version number D3 ...
Page 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Page 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
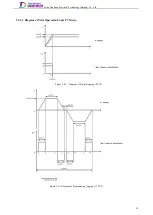
Page 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Page 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































