























TA-U1...U280
Instruction and Operating Manual
Misprints and technical changes reserved
35
4.1.5 Instruction for Mounting
It is recommended to use a galvanized backplate.
All drives are to be mounted in a vertical position. The location where the unit is mounted should be free of dust,
moisture and aggressive gas. In cases where the unit or the switch cabinet is subjected to excessive vibrations, it is
recommended to protect the electronic components by either mounting the plate or the complete switch cabinet in a
shock and vibration absorbing manner.
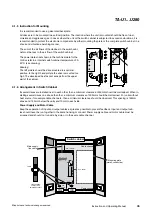
The sum of the air flows of the devices in the switch cabi-
net must be less to the air flow of the switch cabinet.
The power data sheet shown in the technical data for the
U-drive refer to a internal switch-cabinet-temperature of 0 -
40°C. (see drawing)
Drawing
The left picture shows the drive mounted in a optimal
position. In the right hand picture the drive is mounted too
high. The developed heat cannot escape from the upper
part of the cabinet.
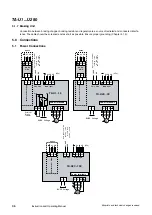
4.1.6 Arrangement in Switch Cabinet
If several drives are installed next to each other, then a minimum clearance of 50mm should be maintained. When in-
stalling several drives one above the other, a minimum clearance of 300mm should be maintained. For units without
heat source,-for example cable channels - then a minimum clearance should be observed. This spacing is 150mm
above and 150mm below the units and 10mm to each side.
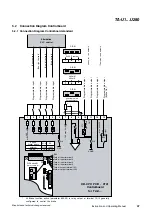
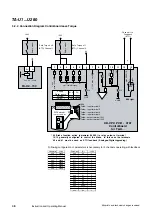
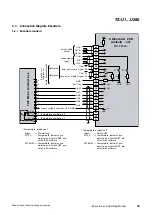
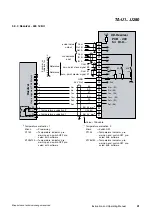
Power Supply and Motor Cable
Keep the separation of input and output cables as great as possible to prevent feedback. Input and output cab-
les should never be run together in the same trunking or conduit. Power supply cable and motor cable must be
screened and should not run side by side, or in the same cable channel.
min.
150mm
min. 150mm
4Q
SR
B
A
I-L
V
U
Bus
W
RS 422 / 485
universal drive
TA-U37 / 45
U-
DRIVE
PG 4000
PG 4001
M
min. 10mm
Cable channal
Cable channal
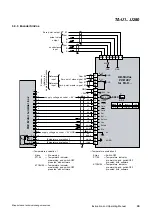
Switch cabinet
Main supply
line cable
Mounting plate
(metall, conductive)
Large surface
contact with
shielding conduit
cable
Sensor
cable
motor
cable







































































