


























-
82
-
7. Diriving Methods for Each Mode
7.1 Position Control Mode (Pulse Input)
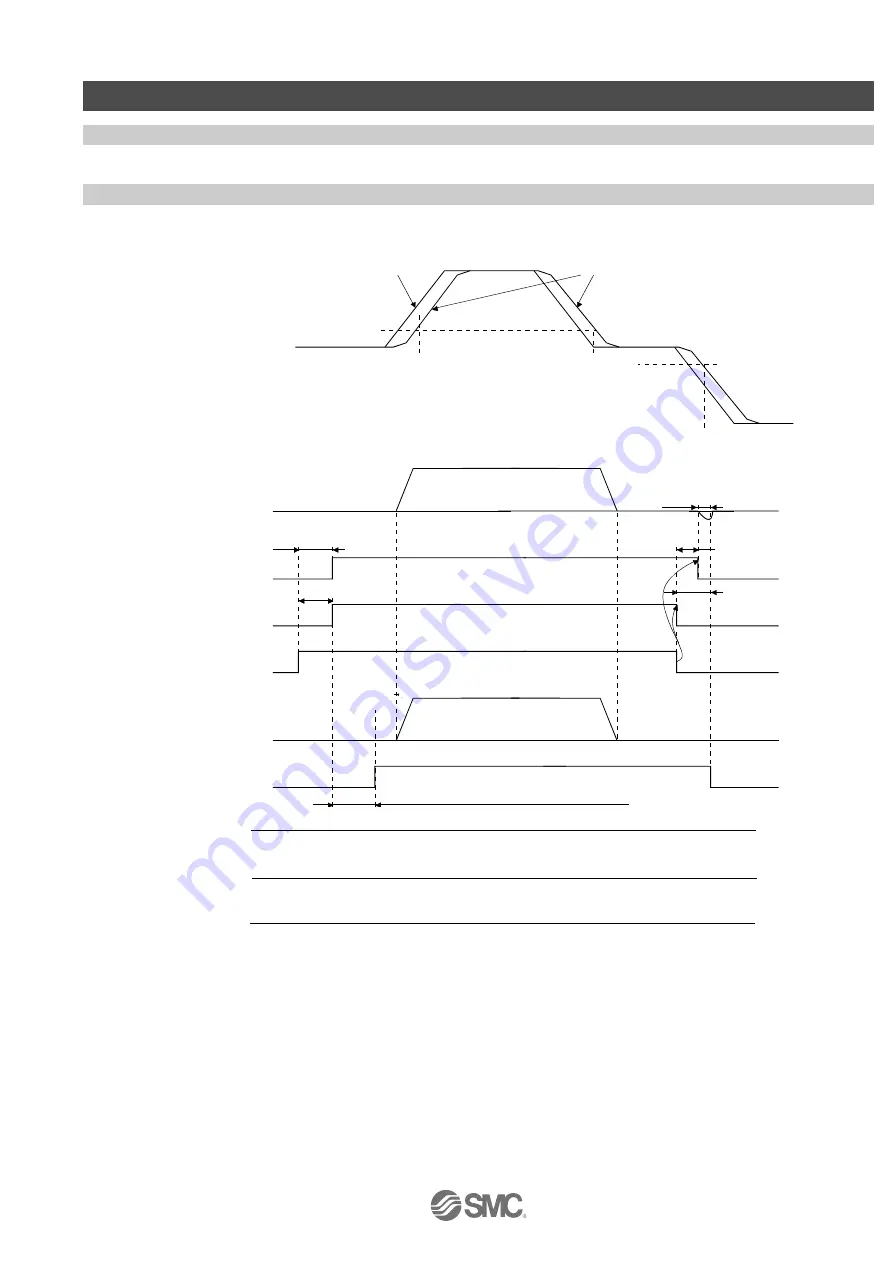
The motor rotation speed and direction is controlled using the pulse train and executes positioning operation.
7.1.1 Position Control Mode Instructions
The command pulse sent as input to the driver from the positioning unit and the driver operates the actuator in
accordance with the command pulse. The command pulse and driver operation examples are shown below.
After-changing gain
Before-changing gain
Change of each gain
CDT = 100ms
63.4%
Droop pulses [pulses] 0
Command pulse
Droop pulses
CDL
CDL
(95ms)
(95ms)
Electromagnetic
brake interlock
(MBR)
(Note 1) ON
ON
OFF
0 r/min
Base circuit
Servo motor speed
Servo-on (SON)
ON
OFF
Coasting
Tb
Electromagnetic
brake operation
delay time
Release
Position command
(Note 4)
Electromagnetic
brake
Release delay time and external relay (Note 2)
(Note 3)
0 r/min
Electromagnetic brake
sequence output
(parameter No. PC09)
Activate
OFF
ON
OFF
ON
OFF
ON
OFF
Forward rotation
stroke end
(LSP)
Reverse rotation
stroke end
(LSN)
Forced stop
(EM1)
Ready (RD)
Lock
Lock operation
Delay time







































































