





























-
16
-
4. List of Parameters for each Mode
These parameters require configuration in each control mode. Please configure parameters as required.
Refer to
“LECSA Operation Manual (Simplified Edition)”, section 5.3 and “LECSA Operation Manual”, chapter 4
for details.
Refe
r to “LECSA Operation Manual”, chapter 4 for parameters which are not disclosed in this document.
Setup software
(MR Configurator2
TM
: LEC-MRC2E) is necessary for the setting of parameter.
*1 Setup software version 1.52E or above is required.
*2 The setup software (MR Configurator2
TM
: LEC-MRC2E) must be purchased as an additional item.
*3 The USB cable (LEC-MR-J3USB) must be purchased as an additional item.
4.1 Parameters common to each mode
(1) [Basic settings parameters (No.PA
□□)]
No.
Symbol
Name
Initial value
Unit
PA01
*STY
Control mode
000h
(2) [I/O setting parameters (No. PD
□□
)]
These parameters are set when changing the input/output signal assignment and switching the input signal
automatic on. See
“LECSA Operation Manual (Simplified Edition)”, section 5.5 and “LECSA Operation
Manual” section 4.4 for details.
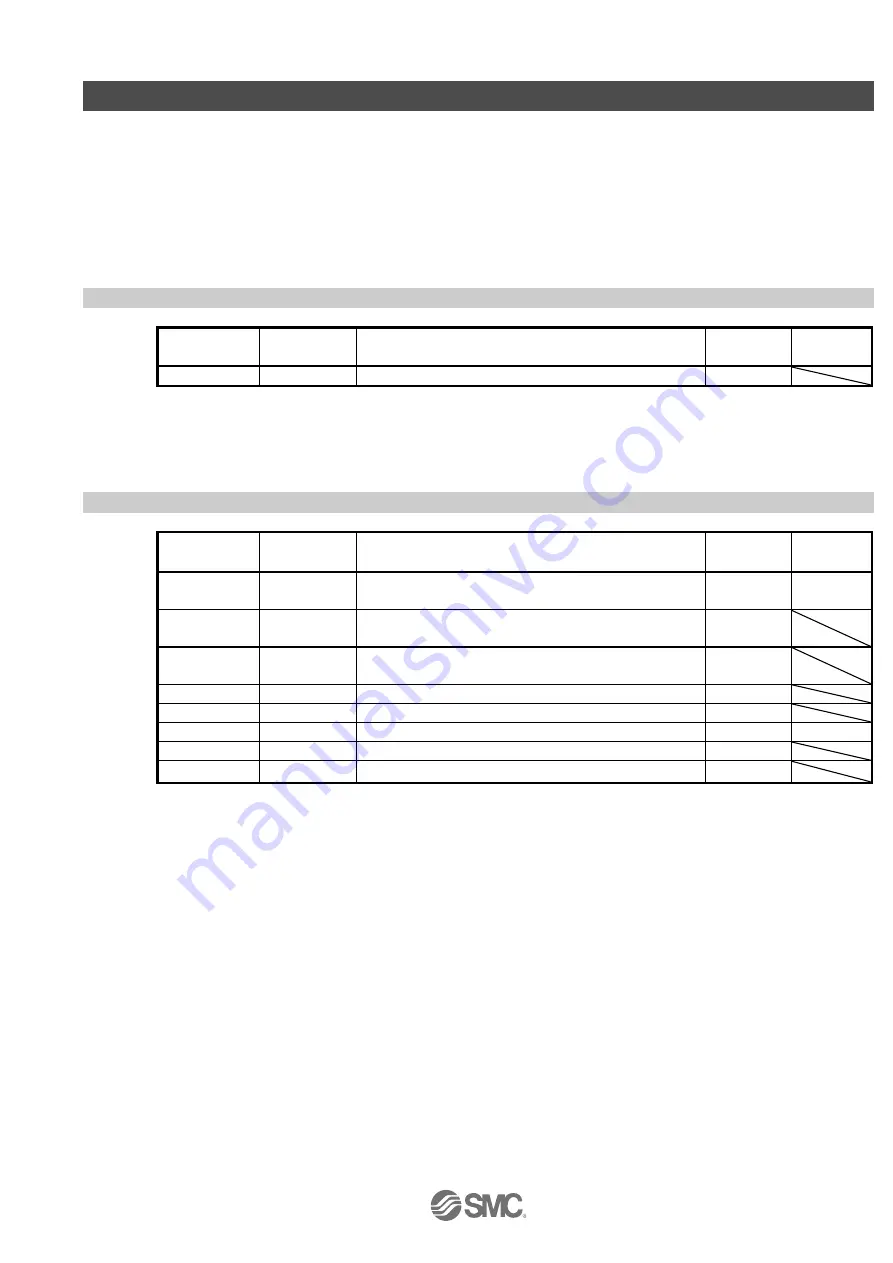
4.2 Position control mode
(1) [Basic settings parameters (No.PA
□□)]
No.
Symbol
Description
Initial value
Unit
PA05
*FBP
Number of command input pulses per revolution
100
×100
pulse/rev
PA06
CMX
Electronic gear numerator
(Command input pulse multiplying factor numerator)
1
PA07
CDV
Electronic gear denominator
(Command input pulse multiplying factor denominator)
1
PA08
ATU
Auto tuning mode
001h
PA09
RSP
Auto tuning response
6
PA10
INP
In-position range
100
pulse
PA13
*PLSS
Command input pulse form
000h
PA14
*POL
Rotation direction selection
0







































































