



















5.2 Interfaces de connexion
Type
Connecteur mâle
Connecteur femelle
DSL
6
10
Température
9
5
Tableau 1 : Position du connecteur mâle/femelle
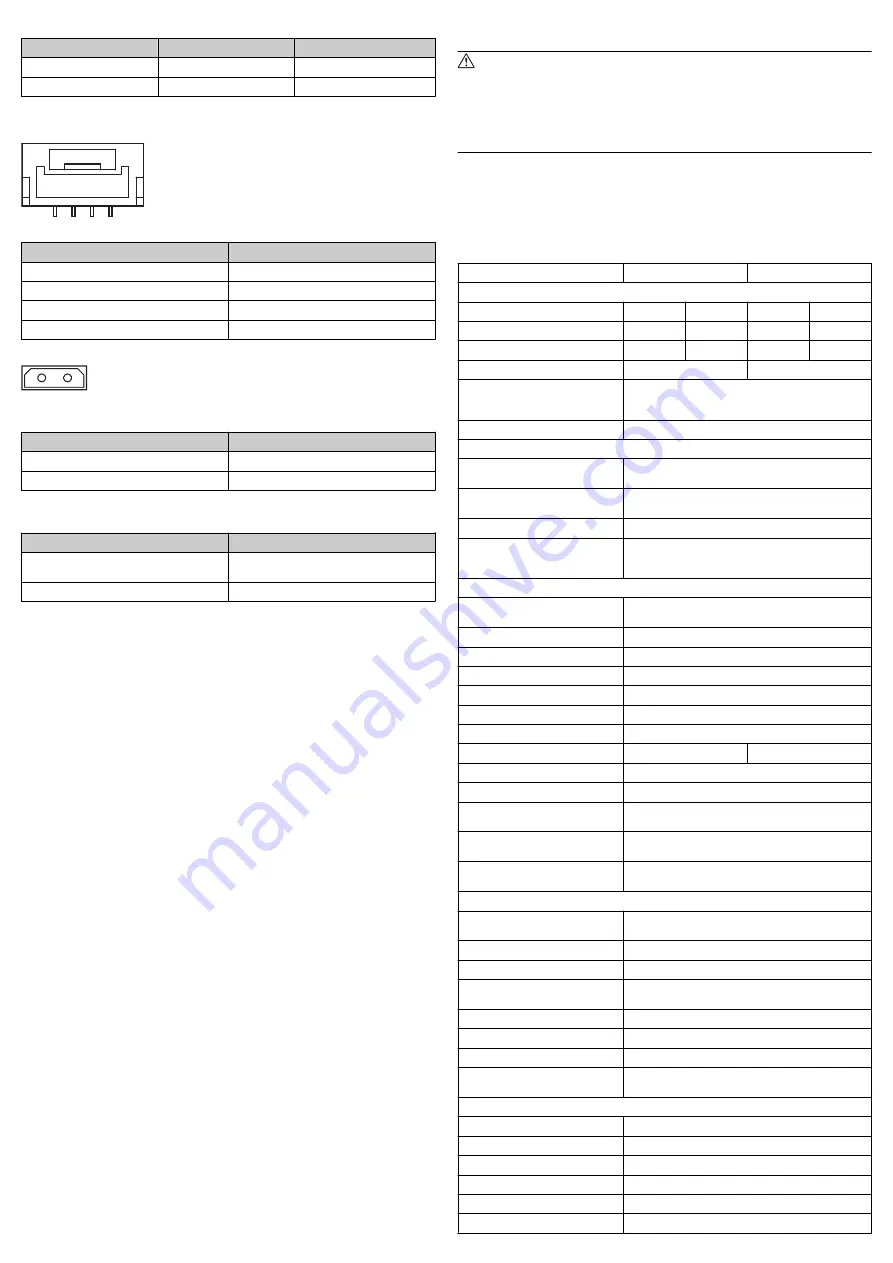
5.2.1
Connecteur femelle DSL
1
2
3
4
Illustration 3: JST BM04B-GHS-GB-TBT (or) - Affectation des broches de l’appareil
Broche
Signal
1
Non affecté (réserve)
2
US+ / DSL+
3
GND / DSL-
4
Non affecté (réserve)
5.2.2
Connecteur mâle capteur de température
2 1
Illustration 4: Harwin M80-8820242 - Affectation des broches de l’appareil
Broche
Signal
1
T+
2
T- / GND
5.2.3
Composants recommandés
Connecteur de câble
Connecteur
Type
DSL
JST GHR-04V-S (boîtier) SSHL-002GA1- P0.2
(contact, or)
Température
Harwin M80-xxx-02-XX
Tableau 2 : connecteur recommandé
5.3 Procédure d’installation électrique
1.
Si nécessaire, retirez avec précaution le capot (7) du codeur (12). Si néces‐
saire, desserrez la vis Torx T08 (8) à l’aide d’un tournevis.
2.
Insérez le connecteur mâle pour le jeu de torons DSL (6) dans le connecteur
femelle DSL (10) sur le codeur suffisamment loin pour qu’il s’encliquète
sans toutefois le soumettre à une tension mécanique.
3.
En option : Insérez le connecteur femelle pour le capteur de température (5)
dans le connecteur mâle du capteur de température (9) sans tension
mécanique.
4.
Posez le capot (7) et serrez la vis Torx T08 (8). Couple de serrage : 0,5
± 0,05 Nm.
5.
En option : Fixez le fil de blindage du jeu de torons DSL au raccordement de
blindage (13) à l’aide d’une vis taraudeuse M2,5 x 5.
5.4 Signaux du système Feedback-moteur
Le système Feedback-moteur a les signaux suivants :
Interface HIPERFACE DSL
®
:
•
US+ / DSL+ : Tension d’alimentation du codeur avec signal de données posi‐
tif superposé. Plage de tension d’alimentation du codeur comprise entre
+7 VDC et +12 VDC.
•
GND / DSL– : Raccordement à la terre du codeur avec signal de données
négatif superposé.
•
T+ : Signal de capteur pour capteur de température/thermistance passifs.
•
T- / GND : Terre de référence pour signal de capteur de température/ther‐
mistance passifs.
6
Mise en service
Pour la mise en service du système Feedback-moteur sécurisé, on suppose que le
fabricant du système d’entraînement connecté a respecté les exigences de
sécurité concernant la conception du système d’entraînement, tel que décrit dans
les informations techniques « HIPERFACE DSL
®
MASTER ».
6.1 Contrôle
Lors de la mise en service, assurez-vous qu’un système Feedback-moteur
sécurisé EDS35-2 / EDM35-2 est utilisé et non pas un système Feedback-moteur
standard EDS35-0 / EDM35-0.
Par ailleurs, le bit du POST (autotest de mise sous tension) doit être défini pour
un système Feedback-moteur sécurisé EDS35-2 / EDM35-2 après la réinitialisa‐
tion du codeur (réinitialisation matérielle ou logicielle). Le bit du POST peut être
validé après un contrôle approfondi positif (voir les informations techniques
« HIPERFACE DSL
®
MASTER »).
Si le décalage de position du système Feedback-moteur est modifié à l’aide de la
ressource 101h (« définir position ») ou 108h (« réglages par défaut »), il est
nécessaire de vérifier que le capteur fournit la position requise.
Aucune mesure d’inspection supplémentaire n’est nécessaire en cours de fonc‐
tionnement.
AVERTISSEMENT
Respectez la durée de vie !
Les systèmes Feedback-moteur sécurisés EDS35-2 / EDM35-2 ont une
durée de vie maximale au-delà de laquelle ils doivent être mis hors service.
La durée de vie des paliers doit être prise en compte en plus de la durée
d’utilisation. Le paramètre atteint en premier en fonction de l’application
détermine le moment auquel le système doit être mis hors service.
L’année de construction du système Feedback-moteur est indiquée sur l’étiquette
de l’appareil et/ou l’étiquette de l’emballage sous forme de code à quatre chiffres
(yyww). Les deux premiers chiffres (yy) correspondent à l’année (sans le siècle), et
les deux derniers (ww) à la semaine calendaire du dernier cycle de production.
7
Caractéristiques techniques
Spécifications techniques
Simple tour
Multitours
Performances
Résolution par tour
20 bits
24 bits
20 bits
24 bits
Bruit de position (σ)
1
± 3“
± 1“
± 3“
± 1“
Précision du système
2
± 50“
± 25“
± 50“
± 25“
Nombre de tours vérifiables absolus 1
4 096
Vitesse lors de la mise en route et
de la réinitialisation du système
Feedback-moteur
3
≤ 6.000 tr./min.
Mémoire disponible
8.192 octets
Interface
Séquence de code
Augmentation de la rotation de l’arbre. Dans le sens
horaire en regardant vers « A » (voir le plan en 3D).
2
Signaux d’interface HIPERFACE
DSL
®4
H-DSL à 2 fils : Numérique, RS485 combiné à l’alimen‐
tation
Durée d’initialisation
5
Max. 500 ms
Mesure de la résistance thermique
externe
6
Format de sortie : 32 bits sans signe ; unité de sortie :
1 Ω ; plage de mesure : 0 ... 209,600 Ω Fonction de
recalcul supplémentaire de PT1000 à KTY84-130
Données électriques
Plage de tension de service/tension
d’alimentation
7 V à 12 V
Rampe de tension d’allumage
7
Max. 180 ms
Consommation électrique
8
Max 1,0 W (Vs = 7 V à 12 V)
Données mécaniques
Dimensions
Voir le plan coté
Masse
Max. 100 g
Moment d’inertie du rotor
5 gcm²
Vitesse de fonctionnement
Max. 12.000 tr./min.
Max. 9.000 tr./min.
Accélération angulaire max.
250.000 rad/s²
Couple de démarrage à 20 °C
≤ 0,4 Ncm
Mouvement d’arbre axial autorisé
(st dynamique)
± 1 mm
Mouvement d’arbre radial autorisé
(dynamique)
± 0,025 mm
Durée de vie des roulements à
billes
50.000 h à 6.000 rpm (au point de mesure défini de
70 °C)
Conditions ambiantes
Plage de température de fonction‐
nement
9
–40 à +115 °C
Plage de température de stockage
–40 à +125 °C (sans emballage)
Altitude d’exploitation
≤ 2.000 m au-dessus du niveau de la mer (80 kPa)
Humidité de l’air relative/conden‐
sation
90 % (condensation non autorisée)
Résistance aux chocs
1.000 m/s
2
/6 ms (selon EN 60068-2-27:2009)
Résistance aux vibrations
500 m/s
2
/10 à 2.000 Hz (selon EN 60068-2-6:2008)
Indice de protection
10
IP40 selon CEI 60529:2014
CEM
11
Selon EN 61000-6-2:2016, EN 61000-6-4:2006,
CEI 6100-6-7:2014
Caractéristiques de sécurité
Niveau d’intégrité de la sécurité
12
,
13
SIL2 (CEI 61508:2011), SILCL3 (EN 62061:2010)
Fonction systématique
13
SC3 (CEI 61508:2011)
Catégorie
3 (EN ISO 13849-1:2015)
Cadence de test
24 h
Taux de demande maximum
14
216 µs
Niveau de performance
PL d (EN ISO 13849-1:2015)
8022479 /14FB/2019-06-19/de, en, es, fr, it
EDS35-2.../EDM35-2... | SICK
15







































































