



















5.2 Interfaces de conexión
Tipo
Conector macho
Conector hembra
DSL
6
10
Temperatura
9
5
Tabla 1: Ubicación de los conectores macho/hembra
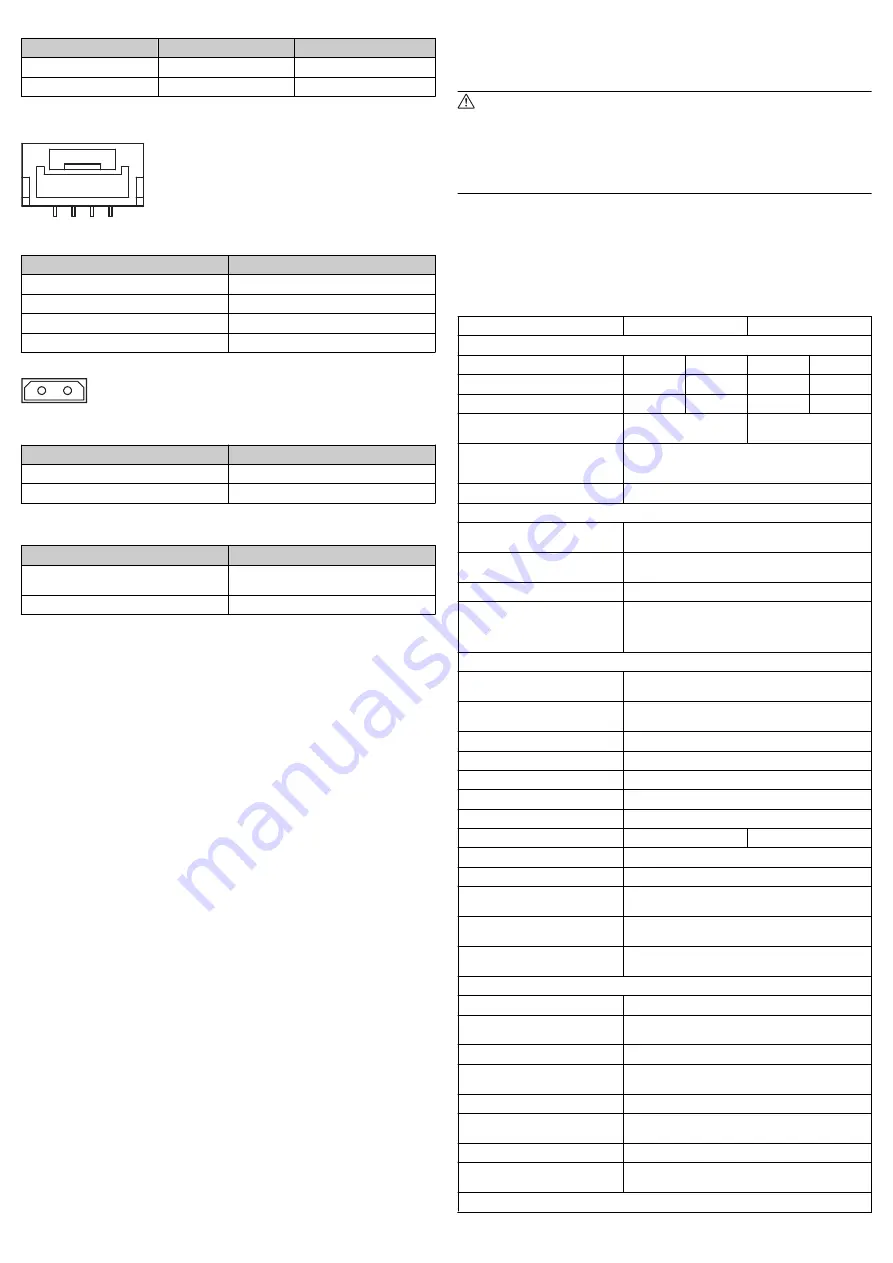
5.2.1
Conector hembra DSL
1
2
3
4
Figura 3: JST BM04B-GHS-GB-TBT (dorado) - Asignación de las patillas del dispo‐
sitivo
Patilla
Señal
1
Sin asignar (reserva)
2
US+/DSL+
3
GND/DSL-
4
Sin asignar (reserva)
5.2.2
Conector macho del sensor de temperatura
2 1
Figura 4: Harwin M80-8820242 - Asignación de las patillas del dispositivo
Patilla
Señal
1
T+
2
T-/GND
5.2.3
Componentes recomendados
Conector de cable
Conector
Tipo
DSL
JST GHR-04V-S (carcasa) SSHL-002GA1-
P0.2 (contacto, dorado)
Temperatura
Harwin M80-xxx-02-XX
Tabla 2: Conector recomendado
5.3 Procedimiento de instalación eléctrica
1.
Si fuera necesario, retire con cuidado la cubierta (7) del encoder (12). Si
fuera necesario, suelte el tornillo Torx T08 (8) con un destornillador.
2.
Inserte el conector macho del juego de hilos trenzados DSL (6) en el conec‐
tor hembra DSL (10) del encoder hasta que encaje, pero asegurándose de
que no se produzcan tensiones mecánicas.
3.
Opcional: Inserte el conector hembra del sensor de temperatura (5) en el
conector macho del sensor de temperatura (9), asegurándose de que no se
produzcan tensiones mecánicas.
4.
Instale la cubierta (7) y apriete el tornillo Torx T08 (8). Par de apriete: 0,5
± 0,05 Nm.
5.
Opcional: Fije el cable de blindaje del juego de hilos trenzados DSL a la
conexión de blindaje (13) utilizando un tornillo autorroscante M2.5x5.
5.4 Señales del sistema de realimentación del motor
El sistema de realimentación del motor tiene las siguientes señales:
Interfaz HIPERFACE DSL
®
:
•
US+/DSL+: Tensión de alimentación del encoder con señal de datos positiva
superpuesta. El rango de tensión de alimentación del encoder es de entre
+7 VDC y +12 V DC.
•
GND/DSL–: Conexión a masa del encoder con señal de datos negativa
superpuesta.
•
T+: Señal del sensor para el sensor de temperatura pasivo/la resistencia de
temperatura.
•
T-/GND: Masa de referencia de la señal del sensor de temperatura pasivo/la
resistencia de temperatura.
6
Puesta en marcha
Para la puesta en servicio del sistema de realimentación del motor, se asume que
el fabricante del sistema de accionamiento conectado ha cumplido con los requi‐
sitos de seguridad en el diseño del sistema de accionamiento, de conformidad
con lo descrito en la información técnica «HIPERFACE DSL
®
MASTER».
6.1 Verificación
Durante la puesta en servicio se debe verificar que se utilice un sistema seguro
de realimentación del motor EDS35-2 / EDM35-2 y no un sistema estándar de
realimentación del motor EDS35-0 / EDM35-0.
Adicionalmente, el bit POST (autodiagnóstico de arranque) se debe establecer
para un sistema seguro de realimentación del motor EDS35-2 / EDM35-2
después de restablecer el encoder (restablecimiento del hardware o del soft‐
ware). El bit POST se puede confirmar tras una verificación exhaustiva positiva
(véase la información técnica «HIPERFACE DSL
®
MASTER»).
Si se modifica el offset de la posición del sistema de realimentación del motor uti‐
lizando el recurso 101h («Establecer posición») o el recurso 108h («Ajustes de
fábrica»), se deberá verificar que el sensor proporcione el valor de posición reque‐
rido.
No se requieren medidas de inspección adicionales durante el funcionamiento.
ADVERTENCIA
¡Se debe tener en cuenta la vida útil!
Los sistemas seguros de realimentación del motor EDS35-2 / EDM35-2 tie‐
nen una vida útil máxima tras la cual siempre deben ponerse fuera de servi‐
cio. La vida útil se debe tener en cuenta adicionalmente a la duración de uso.
El valor que se alcance primero en función de la aplicación determinará
cuándo se debe poner fuera de servicio el sistema.
El año de fabricación del sistema de realimentación del motor consiste en un
código de cuatro dígitos (aass) y se puede consultar en la placa de características
del dispositivo o en la etiqueta del embalaje. Los dos primeros dígitos (aa) indican
el año (sin el siglo) y los dos últimos (ss) indican la semana natural del último pro‐
ceso de producción.
7
Datos técnicos
Especificaciones técnicas
Monovuelta
Multivuelta
Rendimiento
Resolución por vuelta
20 bits
24 bits
20 bits
24 bits
Ruido de posición (σ)
1
± 3“
± 1“
± 3“
± 1“
Precisión del sistema
2
± 50“
± 25“
± 50“
± 25“
Número de vueltas absolutas verifi‐
cables
1
4.096
Velocidad de encendido y restable‐
cimiento del sistema de realimen‐
tación del motor
3
≤ 6.000 rpm
Espacio de memoria disponible
8192 bytes
Interfaz
Secuencia de código
Incrementa con la rotación del eje. Sentido horario
mirando hacia «A» (véase el dibujo acotado).
2
Señales de la interfaz HIPERFACE
DSL
®4
H-DSL de 2 hilos: Digital, RS485 combinado con ali‐
mentación
Tiempo de inicialización
5
Máx. 500 ms
Medición de la resistencia de tem‐
peratura externa
6
Formato de salida: Valor de 32 bits sin signo; unidad
de salida: 1 Ω; rango de medición: 0 ... 209.600 Ω
Función de recálculo adicional de
PT1000 a KTY84-130
Datos eléctricos
Rango de tensión de servicio/
tensión de alimentación
7 V … 12 V
Rampa de tensión de la sincroni‐
zación de encendido
7
Máx. 180 ms
Consumo de potencia
8
Máx. 1,0 W (Vs = 7 V … 12 V)
Datos mecánicos
Dimensiones
Véase el dibujo acotado
Peso
Máx. 100 g
Momento de inercia del rotor
5 gcm²
Velocidad de servicio
Máx. 12.000 rpm
Máx. 9.000 rpm
Aceleración angular máx.
250.000 rad/s²
Par de arranque a 20 °C
≤ 0,4 Ncm
Movimiento axial admisible del eje
(estático + dinámico)
± 1 mm
Movimiento radial admisible del eje
(dinámico)
± 0,025 mm
Vida útil de los rodamientos de
bolas
50.000 h a 6.000 rpm (con un punto medición defi‐
nido de 70 °C)
Condiciones ambientales
Rango de temperatura de servicio
9
–40 … +115 °C
Rango de temperatura de almace‐
namiento
–40 … +125 °C (sin el embalaje)
Altitud de servicio
≤ 2.000 m sobre el nivel del mar. (80 kPa)
Humedad relativa del aire/conden‐
sación
90 % (sin condensación)
Resistencia a los impactos
1.000 m/s
2
/6 ms (según EN 60068-2-27:2009)
Resistencia a las vibraciones
500 m/s
2
/10 … 2.000 Hz (según
EN 60068-2-6:2008)
Clase de protección
10
IP40 según IEC 60529:2014
CEM
11
Según EN 61000-6-2:2016, EN 61000-6-4:2006,
IEC 6100-6-7:2014
Características de seguridad
8022479 /14FB/2019-06-19/de, en, es, fr, it
EDS35-2.../EDM35-2... | SICK
11







































































