





























The ORB is compatible with the latest CAN Flexible-Data-rate (FD) specification.
Pins 11 and 12 on the ORB header provide the interface to a CAN network with pin 11 being CAN High
(dominant high) and pin 12 bing CAN Low (dominant low).
In CAN networks, 120 Ω terminating resistors are found at each end of the network. In most systems, the
terminating resistos will already be in place and will not be needed. In cases where a sensor network is
being formed between an ORB and external sensor, a 120 Ω resistor should be placed between the pins 11
and 12 on the ORB.
Warning In CAN bus systems, the ground supplied to the ORB must be the same ground as used by
the CAN network. High differential voltages between the CAN lines and ground can damage the
CAN interface.
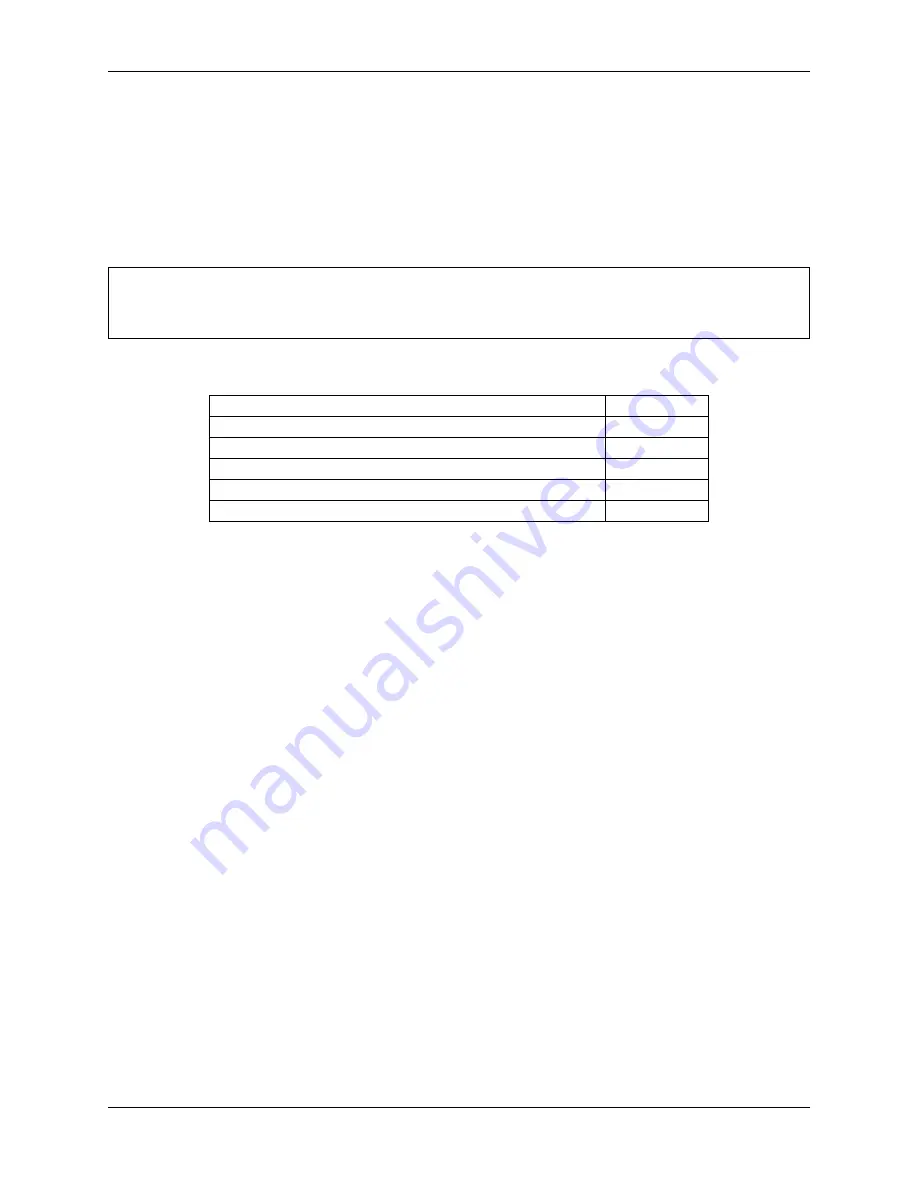
6.5.1 Specification
Parameter
Specification
CAN High driver voltage (typical)
2.9V
CAN Low driver voltage (typical)
0.9V
Common mode voltage for reception (maximum)
+-25V
Absolute maximum voltage on CAN High and CAN Low
+-60V
Termination resistor
120Ω
6.5.2 Settings
Measurements can be scheduled as a multiple of the base-interval. The fastest possible measurement rate
is achieved by setting the interval to 1 in which case measurements will occur on every base interval.
After each measurement, the ORB can be configured to compare the value to preset warning and alarm
levels. To reduce power consumption, the measurement rate can be turned down by increasing the
interval.
The ORB CAN bus supports can bit rates of 125, 250, 500 and 1000 bits per second as specified in the
Nominal Baud Rate field.
To ensure minimum intrusion on CAN systems, the ORB can be set to listen only. In this mode the ORB
will only receive messages that are acknowledged on the bus by a listening node. Where required, the
ORB can be made to acknowledge messages by selecting the TX Enable option.
A typical automotive CAN network will contain thousands of messages, all with their own identifiers.
The ORB can filter only the required messages by filling in the ID Capture List. Required identifiers
should be entered in hexidecimal and should be separated by commas. Leave the ID Capture List blank to
receive all messages.
The Capture-Time setting can be used to set a timeout after which the CAN bus will stop listening,
allowing the ORB to transmit received messages and return to sleep. Capture-time can be used as a mech-
anism to allow the ORB to sample the CAN bus for a defined time-period.
A full list of CAN bus settings is given in the table at the end of this chapter.
6.6 Output
An open-collector output that can be made to switch to ground is provided on pin 10 of the header. The
output is capable of sinking 450mA to ground and has an internal resettable fuse in place to prevent
ORB User Guide, Release 1.1
70
Chapter 6. External Sensors
Summary of Contents for ORB-X1-G
Page 1: ...ORB User Guide Release 1 1 Senquip Sep 14 2020...
Page 2: ......
Page 16: ...ORB User Guide Release 1 1 10 Chapter 1 Introduction...
Page 44: ...ORB User Guide Release 1 1 38 Chapter 3 Power Supply...
Page 50: ...ORB User Guide Release 1 1 44 Chapter 4 General Setup...
Page 86: ...ORB User Guide Release 1 1 80 Chapter 6 External Sensors...
Page 92: ...ORB User Guide Release 1 1 86 Chapter 7 Network Connection...
Page 98: ...ORB User Guide Release 1 1 92 Chapter 8 Endpoint Setup...
Page 116: ...ORB User Guide Release 1 1 110 Chapter 10 Mechanical Speci cation...
Page 130: ...ORB User Guide Release 1 1 124 Chapter 12 Troubleshooting Guide...
Page 134: ...ORB User Guide Release 1 1 128 Index...
Page 136: ......





















































