
























User Manual
94
User Manual
95
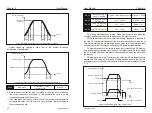
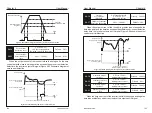
K1
1
K2
Run
0
1
0
0
1
1
0
Forward
Reverse
Stop
Stop
K1
K2
T
X1 Forward (FWD)
X2 Reverse(REV)
COM
Figure 6-8 Two-wire mode 1
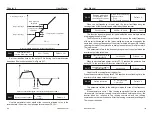
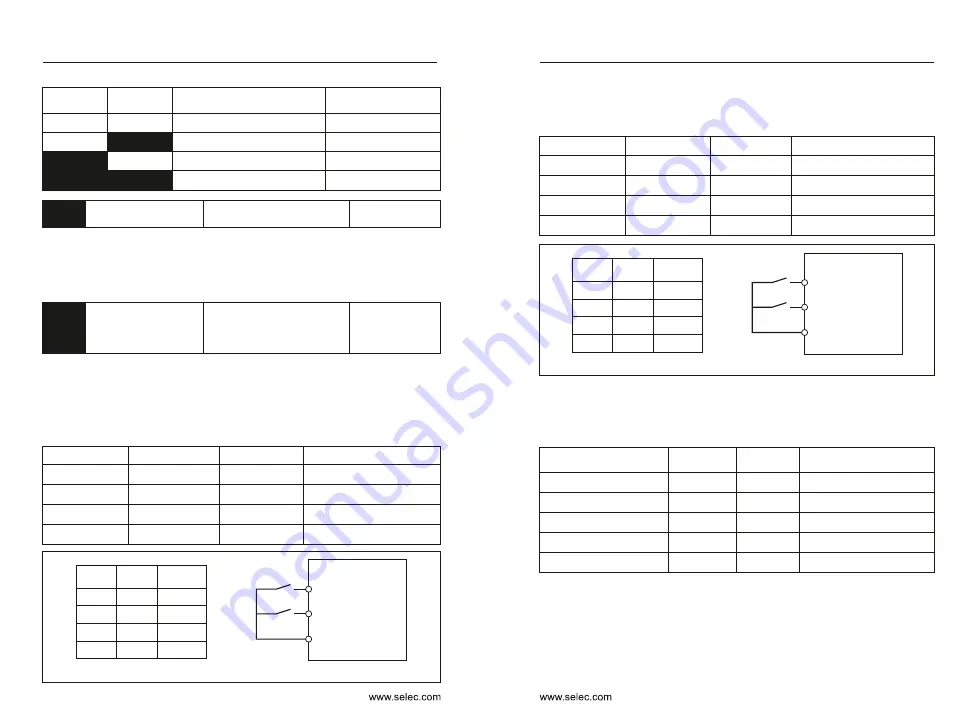
1 : Two-wire mode 2, in this mode, the X1 terminal function is the operation
enable terminal, and the X2 terminal function determines the running
direction. The terminal function settings are as follows:
Figure 6-9 Two-wire mode 2
K1
1
K2
Run
0
1
0
Forward
Reverse
Stop
Stop
K1
K2
X1 Running
X2 Positive &
negative direction
COM
1
0
0
1
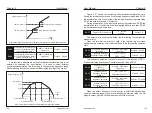
2
:
Three-wire control mode 1, this mode X3 is the enable terminal, and the
direction is controlled by X1 and X2 respectively. Terminal function settings
are as follows
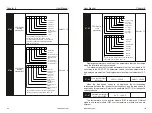
Terminal2
Terminal 1
Acceleration or deceleration
time selection
Corresponding
parameter
OFF
OFF
Acceleration time 1
P0-17, P0-18
OFF
ON
Acceleration time 2
P8-03
,
P8-04
ON
OFF
Acceleration time 3
P8-05
,
P8-06
ON
ON
Acceleration time 4
P8-07
,
P8-08
P4-10
Input terminal
filter time
0.000s
〜
1.000s
Default
:
0.010
Set the software filter time for the terminal status. If the input terminal is
susceptible to interference and cause malfunction, increase this parameter to
enhance the anti-interference ability. However, this parameter increase will
cause the X terminal to respond slowly.
P4-11
Terminal command
mode
Default
:
0
0: two-wire mode 1
1: two-wire mode 2
2: Three-wire mode 1
3: Three-wire mode 2
This parameter defines four different ways to control the operation of the
drive via external terminals.
Terminal function settings are as follows:
0: Two-wire mode 1, The positive and negative running of the motor is
determined by terminals X1 and X2.
Chapter 6
Chapter 6
Terminal
Function code
Setting value
Description
Command Mode
P4-11
0
Two-line type 1
X1
P4-00
1
Forward running (X1)
X2
P4-01
2
Reverse run (X2)
Control mode
P0-02
1
Control by terminal
Run enable
Positive & negative direction
Terminal
Function code
Setting value
Description
Command Mode
P4-11
1
Two-line type 2
X1
P4-00
1
X2
P4-01
2
Control mode
P0-02
1
Control by terminal
Terminal
Function
code
Setting
value
Description
Terminal command mode
P4-11
2
Three-wire type 1
X1
P4-00
1
Forward running (X1)
X2
P4-01
2
Reverse run (X2)
X3
P4-02
3
Three-wire operation control
Control mode
P0-02
1
Control by terminal







































































