

























PA-26
PID feedback
loss detection value
Default
:
0.0%
0.0%
:
Do not judge feedback
loss
0.1%
~
100.0
%
PA-27
PID feedback loss
detection time
0.0s
~
20.0s
Default
:
0.0s
This function code is used to judge whether the PID feedback is lost.
When the PID feedback amount is less than the feedback loss detection
value PA-26 and the duration exceeds the PID feedback loss detection time
PA-27, the inverter alarms the fault Err31 and processes according to the
selected fault processing mode.
PA-28
PID shutdown
operation
Default: 0
0
:
No operation at stop
1: Operation at stop
It is used to select whether the PID continues to operate under the PID stop
state. In general applications, the PID should stop computing in the shutdown
state.
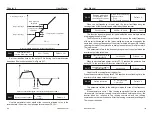
The swing frequency function is suitable for textile, chemical fiber and
other industries, as well as occasions requiring traverse and winding
functions. The swing frequency function refers to the inverter output
frequency, which swings up and down with the set frequency as the center,
and the running frequency is in the time axis.
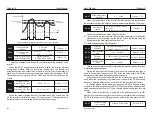
As shown in Figure 6-31, the swing amplitude is set by PB-00 and PB-01.
When PB-01 is set to 0, the swing is 0. At this time, the swing frequency does
not work.
PB: Swing frequency, fixed length and counting
Figure 6-31 Schematic diagram of swing frequency operation
PB-00
Swing frequency
setting method
0: Relative to the center frequency
1: relative to Maximum frequency
Default
:
0
This parameter is used to determine the reference amount of the swing.
0
:
Relative to the center frequency (P0-07 frequency source), it is a variable
swing system. The swing varies with the center frequency (set
frequency).
1 : Relative to the Maximum frequency (P0-10), for a fixed swing system, the
swing is fixed.
Swing frequency
range
0.0%
〜
100.0%
Default
:
0.0%
Kick frequency
amplitude
0.0%
〜
50.0%
Default
:
0.0%
PB-01
PB-02
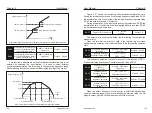
Output frequency Hz
Limit frequency on swing
frequency
Center frequency Fset
Limit frequency under swing
frequency
+Aw
-Aw
Running
Swing frequency range Aw=Fset*PB-01
Testile kick
frequency
= Aw*PB-02
Accelerate
by acce-
leration time
Triangle
wave rise
time
wobble
cycle
Decelerate by
Deceleration time
Time t
User Manual
142
User Manual
143
Chapter 6
Chapter 6