





























31
when moving backwards. When moving backwards, the profile data is either
changed (overwritten) or only the position of the operator is noted. It is
managerd by this parameter state.
o
Bluetooth wheel
– if it is not possible to physically connect a survey wheel, for
example, for a
Python
GPR, or for a low-frequency unshielded antenna 150-75-
38 MHz, it is possible to use a wireless Bluetooth wheel, like our
xWheel
(for
more details, take a look on the Radar Systems, Inc. website –
User should to check the
Enable
item of the Bluetooth wheel parameter group,
to use it. Any Bluetooth device must be connected using the operating system
tools. User should check the assigned COM port number. This number has to be
selected in the COM port list of the Bluetooth wheel.
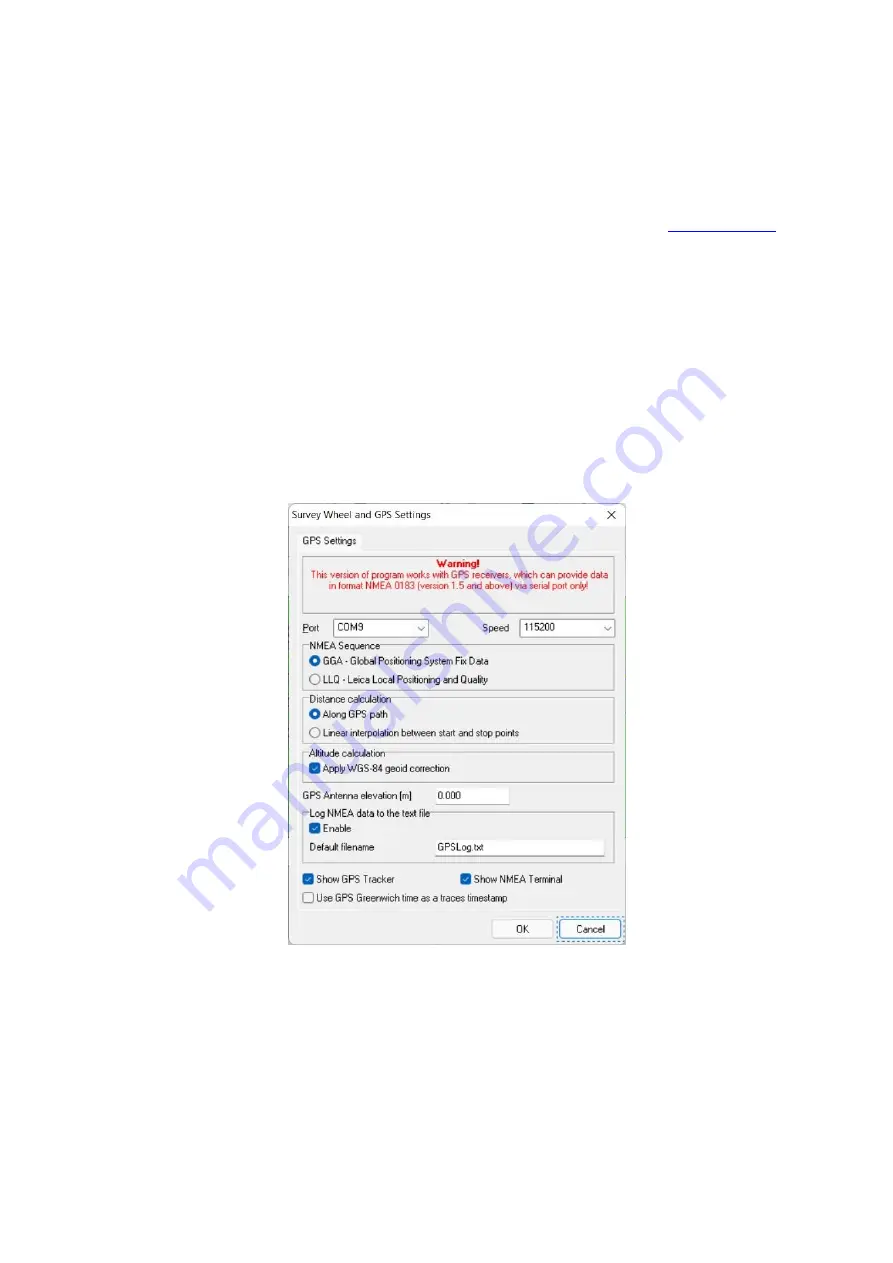
GPS - global positioning system or GNSS - global navigation satellite system (it
combines signals from different satellite navigation systems as GPS [USA],
GLONAS [Russia], GALILEO [European Union], BeiDou [China], NavIC/IRNSS
[India] and QZSS [Japan]). Software supports GPS/GNSS receivers which outputs
coordinates in NMEA 0183 format (version 1.5 and higher). The latitude and
longitude are recorded in the header of each trace, which are used to calculate the
current coordinate of the trace and the traveled distance. The GPS/GNSS settings
for pairing with the GPR and its data presented in GPS settings window (Fig. 8.5).
Fig.8.5. GPS/GNSS settings
o
Port
– GPS/GNSS receiver connection to PC is possible via a COM Port,
including Bluetooth and USB interfaces, which presented as virtual COM ports.
It is needed to specify the Speed of the serial connection, which indicated in the
GPS/GNSS receiver user’s manual.







































































