Parker Hannifin S.p.A. - Divisione S.B.C. “SPD” User’s Manual
83
14 SBC Can
A CanBus interface based on the physical layer ISO/DIS11898 is included on the SPD
converter. The Data link layer is the full CAN version 2.0 part A (ID 11 bit) and a subset of
the application layer SBCCAN is used.
The CanBus on the SPD has two functional modes.
The first functional mode is
real time mode
. This is to establish a real time digital link
between 15 SPDs and a control that executes the calculation of the trajectories and sends the
position reference, the speed reference or both to the SPDs which can change the actual
position of the motors (b150.2=1). Real time mode is active when Pr31=15.
The second functional mode is
communication mode
. This is used to write or read every
parameter of each SPD connected to the bus (maximum of 15). This function is very useful
when you want to sue the motion functions that have already been realized in the base
software of the SPD. Communication mode is automatically set when Pr31
≠
15.
The CanBus node must be set through Pr27 with values from 0 to 14 (*).
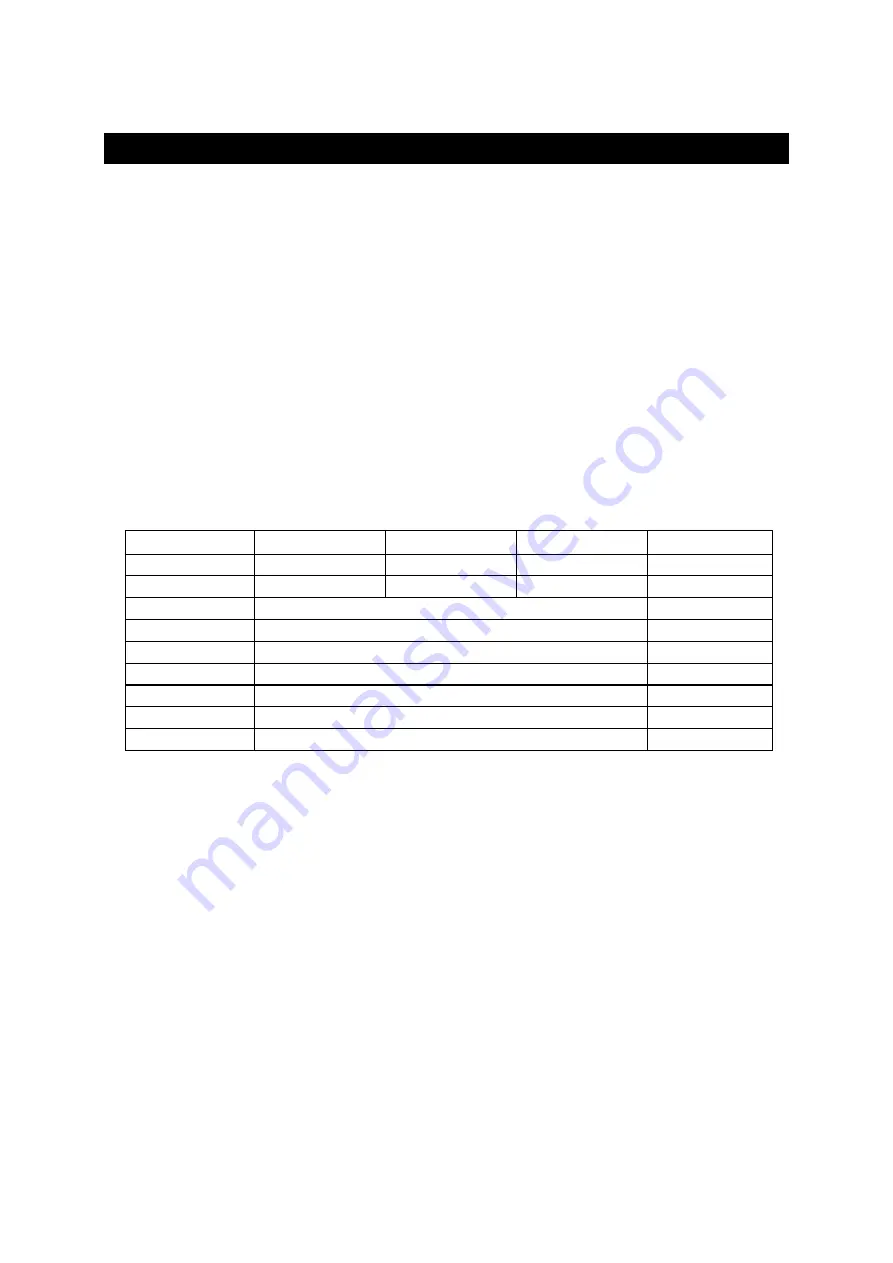
Transmission speed depends on Pr31, Pr48 e b150.4 as the following table:
For bus length greater then about 1000 m bridge or repeater devices may be needed.
All changes in speed, address or function mode are activated using the b42.3 command or
when the converter is powered on again.
(*) In the messages via CanBus, the node number is identified through Pr27+1, i.e. with
values from 1 to 15
Pr48
Pr31
≠
15
Pr31=15 b150.4
Max.
length
0
125 kbps
1 Mbps
0
0
125 kbps
500 kbps
1
1 1
Mbps
40
m
2 500
kbps
100
m
3 250
kbps
250
m
4 125
kbps
500
m
5 50
kbps
1000
m
6 20
kbps
2500
m
7 10
kbps
5000
m