

























58
59
The function of parameters
Parameter
No.
Name of parameter
Description
33
I
1/
I
2 function
selection
*2
(REVERSE-TRIP RESET)
CW run with
switch
State of
I
1
and
I
2
Action
I
1
I
2
—
ON Trip reset (which must be retained 0.2 sec or longer)
*1
34
35
36
I
3 function selection
I
4 function selection
I
5 function selection
The function of signal input
I
3 can be individually selected as follows:
(FREE)
: ON (shorted between signal
I
3 and
“COM”)
→
Free-run stop instruction
(THERMAL)
: OFF (open between signal
I
3 and
“COM”)
→
External forced trip instruction
•
Before setting, short-circuit
I
3 to
“COM”.
Open circuit will cause tripping.
(UP-DOWN)
: ON (shorted between signal
I
3 and
“COM”)
→
2nd acceleration/deceleration time
(RESET)
: ON (open between signal
I
3 and
“COM”)
→
Trip reset instruction
The functions that can be selected with signal inputs
I
3,
I
4, and
I
5
are changed to speed setting selection according to the setting value
of
“ 32 operation mode selection”.
Set value of “32
operation mode
selection”
Operation
made
Function of signal input
I
3
I
4
I
5
1st speed
operation mode
Free-run stop
External forced trip
2nd acceleration/deceleration time
Trip reset
2nd speed
operation mode Speed setting
4th speed
operation mode Speed setting Speed setting
8th speed
operation mode Speed setting Speed setting Speed setting
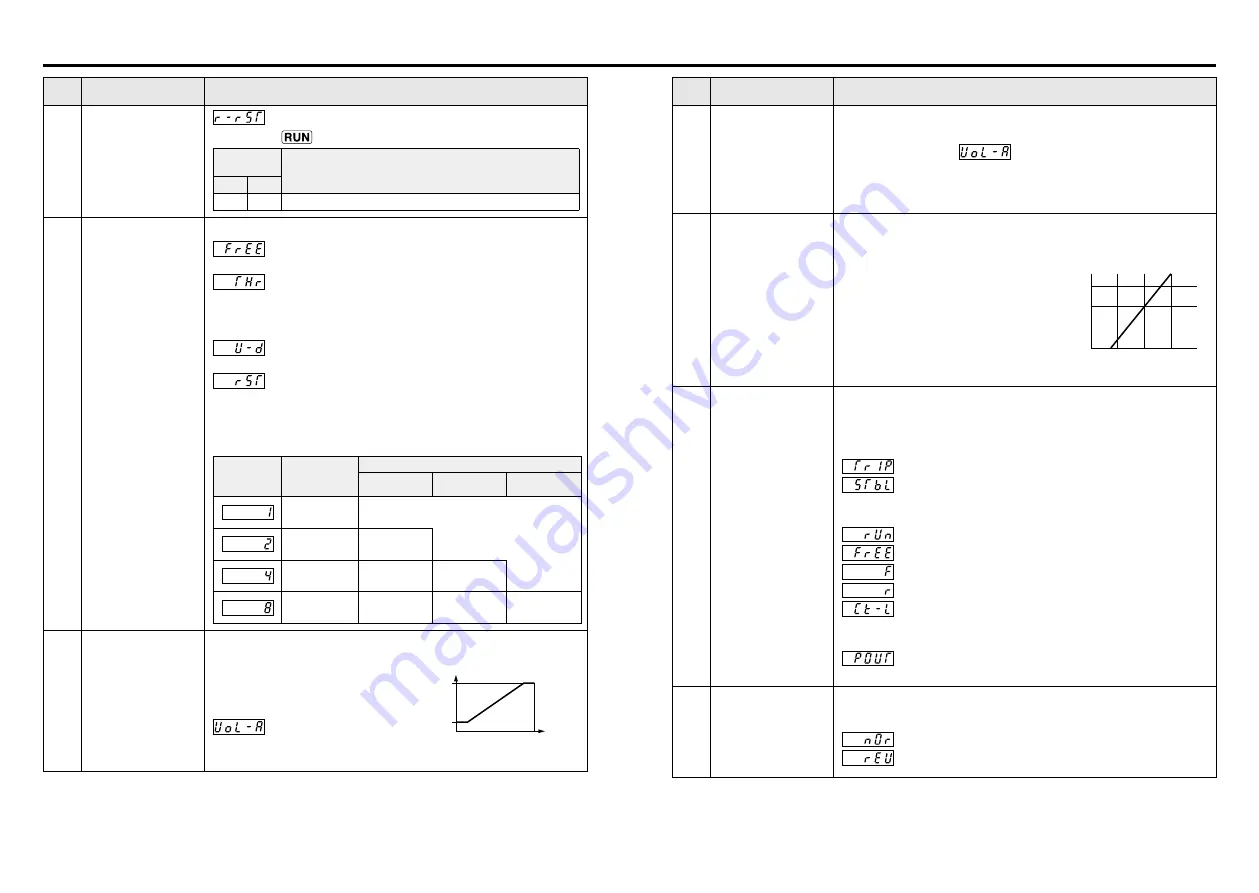
3A Lower speed limit
Set the lower limit of the motor
setting speed.
For example, when “ 31
Speed command selection”
is analogue speed instruction
(VOL-A), motor
setting speed at 0 V
input is set.
0.5
0
4.5 5 V
Input
voltage
Speed instruction value
Upper speed
limit
Lower speed
limit
Parameter
No.
Name of parameter
Description
3b Upper speed limit
Set the upper limit of the motor setting speed.
For example, when
“ 31 Speed command selection” is analogue
voltage speed setting
(VOL-A), motor setting speed at 5 V
input is set. Further, upper limit of
“ 00 Internal speed (0-th speed)”
and
“ 01 1st speed” to “ 07 7th speed” and “ 44 Speed matching
range
” is limited by this parameter.
3C Torque limit
Set the upper limit of motor output
torque with torque reference. (Since
the torque is not controlled, there
is no precision, please use as a
guide.) It represents the rated torque
equivalent with the torque reference
100 %. There is a different offset
between the torque reference and
the output torque depending on the
motor.
Torque reference
Output torque
Specification of
torque reference - output torque
(Representative characteristic)
150
100
0
50
100
150
[%]
[%]
0
40
41
O1 function
selection
O2 function
selection
Output terminal “O1” and “O2” can also be selected as follows.
Polarity of “ 40 O1 function selection” and “ 41 O2 function
selection” can be inverted by “ 42 O1 output polarity selection”
and “ 43 O2 output polarity selection”
(TRIP)
: Trip signal (Trip: ON)
(STABLE) : Arriving signal
(Speed is reached to a command value ON)
→
See “ 44 Speed matching range”.
(RUN)
: Run/Stop signal (When running: ON)
(FREE)
: Free-run signal (During free run: ON)
(FORWARD) : CCW run signal (During CCW run: ON)
(REVERSE) : CW run signal (During CW run: ON)
(CHECK-L) : Overload detection
Output when load exceeds 100%
(Load exceeds 100%:ON)
(PULSE-OUT) : Speed pulse signal
→
See “ 45 Output pulse count selection”.
42
43
O1 output polarity
selection
O2 output polarity
selection
This is a function for inverting the polarity of signal output
between output terminal “O1” “O2” and “COM”.
(NORMAL) : Transistor “ON” when activated
(REVERSE) : Transistor “OFF” when activated
*1 Effective only when trip occurs
*2 When using the
I
1 input, turn on the
I
1 input enable switch (SW3) on the back of the product and
set the RUN switch on the front of the product to RUN.
When using the
I
2 input, set the CCW / CW switch on the front of the product to CCW.







































































