





























18
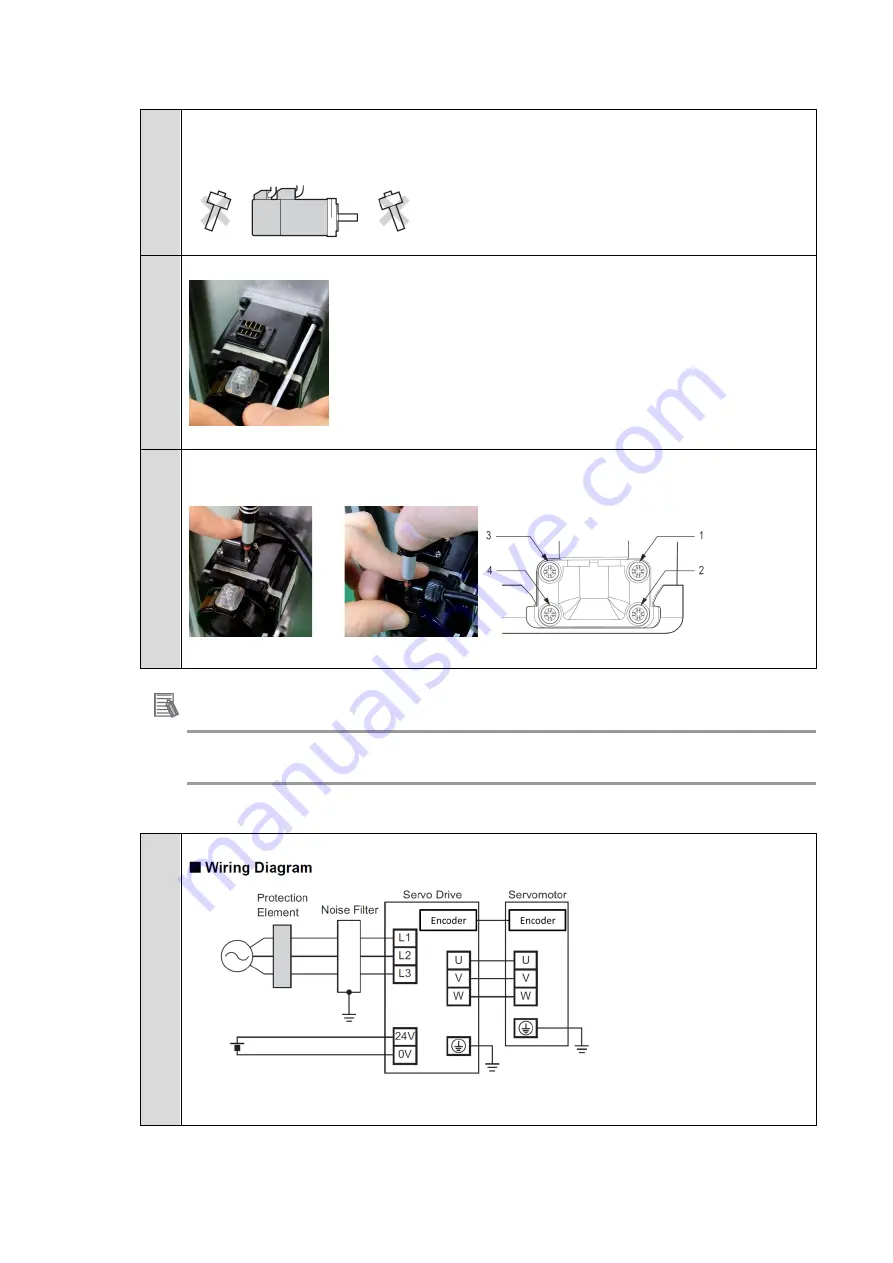
■ Motor installation
(step 2, 3 order depends on your mechanical implementation)
1.
Please handle the motor carefully &
do not apply heavy impacts or loads during
transport, installation, or removal of the motor.
2.
Please fixe and connect the motor to the mechanical system
Note: At first, please check motor operation without any load.
3.
Please attached the power and encoder cable
Here is an example with 200W motor
Please tight screws in several times in this order :1>4>3>2
Additional Information
For further details about coupling method, please refer to 1S-series AC Servomotors and Servo Drives
User’s Manual (with Built-in EtherCAT Communications) (Cat. No. I586)
■ Wiring
1.
Overview
For further details please refer to section 4-2 wiring of 1S AC servo drive user’s manual
(Cat. No. I586)
Summary of Contents for R88D-1SNx-ECT Series
Page 17: ...17 2 Approach the drive from top to down 3 Tight the upper part 4 Tight the down part...
Page 38: ...38 6 Add the Emergency stop button 7 Add the Reset button 8 Edit I O Map variables...
Page 58: ...58 11 Results Wizard step 5 Save to EEPROM Finish...
Page 59: ...2016 0616 0616 I823 E1 01 Note Do not use this document to operate the Unit...





















































