





























Neomatica LLC. Vehicle tracker ADM333BLE GLONASS/GPS. Ver. 1.2 dd 13.07.2019
29
DTC
– failure mask. Fields of the mask are described in the sensor protocol
LMT
– time passed since the last message from the sensor was received
R - RSSI.
7 Data transmission to the server from connected sensors
7.1 Description of ADM31 sensors parameters transmitted to the server
Data from ADM31/32 sensors is transmitted in CAN data packet together with other data in
each message. There are 5 CAN fields for each sensor. The correspondence of CAN fields to the
transmitted data type is given in table 3. The sensor number given in the table corresponds to the
number of the added sensors list.
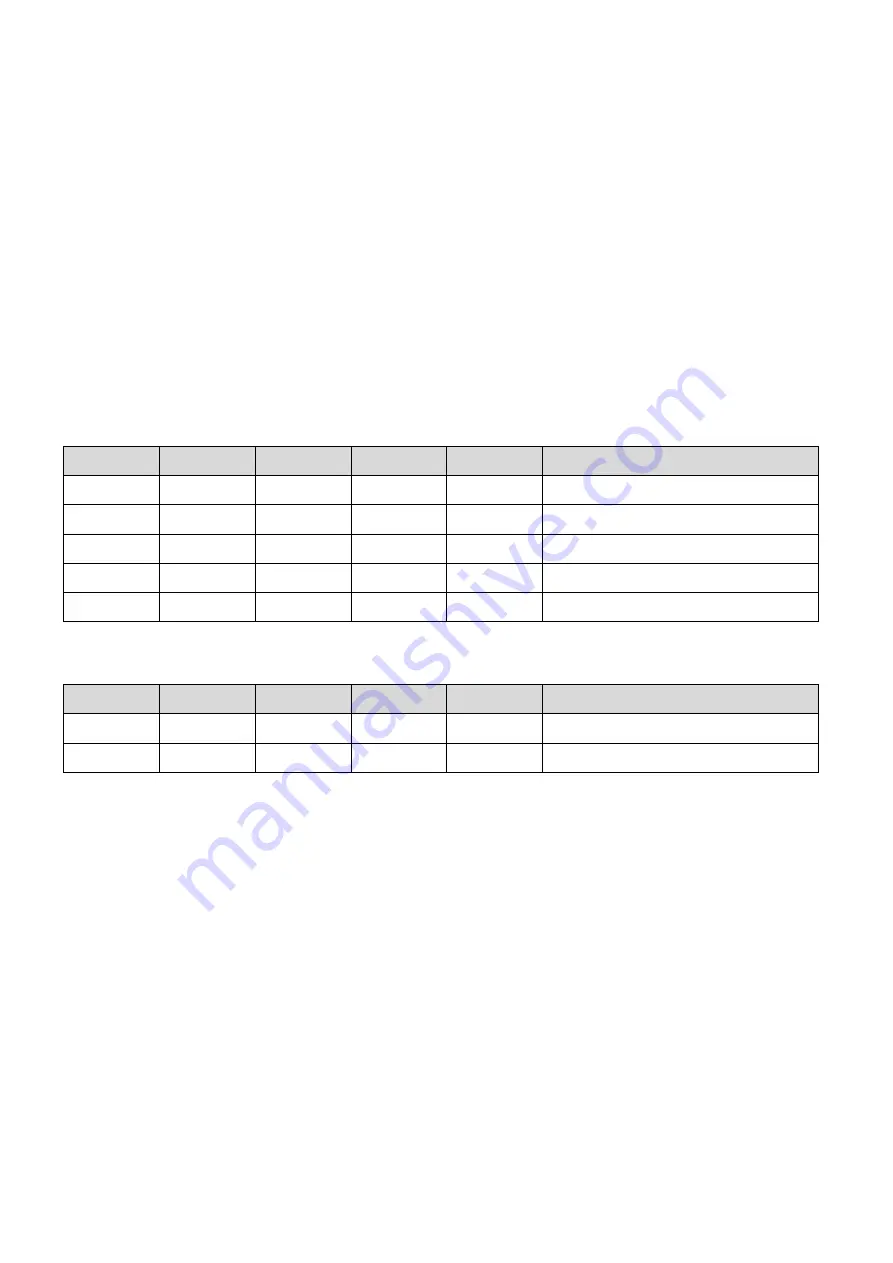
Table 3. Description of transmitted data from ADM31 sensors
Sensor 0
Sensor 1
Sensor 2
Sensor 3
Sensor 4
Parameter
can1
can6
can11
can16
can21
Temperature
can2
can7
can12
can17
can22
Humidity
can3
can8
can13
can18
can23
Illumination level
can4
can9
can14
can19
can24
Battery voltage
can5
can10
can15
can20
can25
Hall sensor
Table 4. Description of transmitted data from ADM32 sensors
Sensor 0
Sensor 1
Sensor 2
Sensor 3
Sensor 4
Parameter
can1
can6
can11
can16
can21
Angle
can4
can9
can14
can19
can24
Battery voltage
7.1.1 Conversion of incoming data at the server side
Since CAN data packet is universal, calculation formulas are not applied to these fields on
the servers.
To convert values to a readable format, the following calculation formulas described below
should be applied to the incoming values.
To prevent values jumps when there is no communication with the sensors, it is
recommended to set a range of permissible values on the software side. Or apply other filters
supported by the software you use.
•
Temperature







































































