





























6 - 2
6. ADJUSTMENT
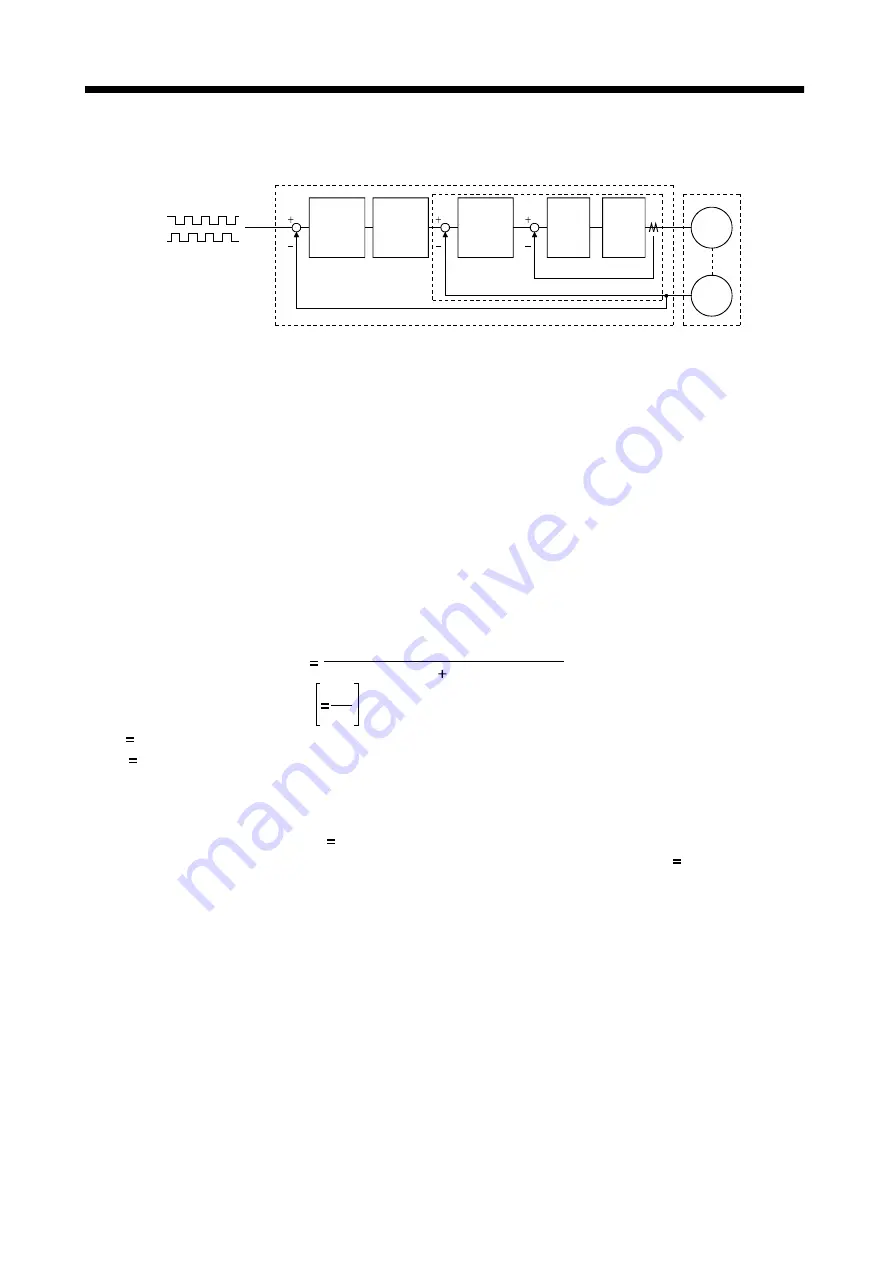
6.1.2 Basics of the servo system
Encoder
Deviation
counter
PG2
Position
control
section
VG2
Speed
control
section
Current
control
section
Power
control
section
Current loop
Speed loop
Position loop
Servo motor
Motor
Command pulse train
A general servo system configuration is shown above. The servo control system consists of three loops:
current loop, speed loop and position loop. Among these three loops, the response of the inside loop must
be increased 4 to 6 times higher. If this condition is not satisfied, vibration will be generated. If the
condition further worsens, hunting will occur.
(1) Current loop
For this servo amplifier, the response level of the current loop is factory-set to a high value and need
not be adjusted. If the motor is installed to the machine, the response of the current loop will hardly
vary.
(2) Speed loop
Response will vary according to the inertia moment of the machine. When the load inertia moment
increases, the response of the speed loop will reduce. Use the speed loop gain (VG2) to compensate for
the reduction of the response level.
Speed loop response fv[rad/s]
Amplifier gain setting VG2 [rad/s]
1 m
m: Load inertia moment ratio
J
M
J
L
J
L
load inertia moment
J
M
servo motor shaft inertia moment
(3) Position loop
The response level will not vary according to machine conditions.
Position loop response fp [rad/s] amplifier gain setting PG2 [rad/s]
When the motor is installed to the machine, the gain must be adjusted to satisfy fv 4 to 6fp according
to the load inertia moment ratio m.
Summary of Contents for MR-J2-03B5
Page 11: ...A 10 MEMO ...
Page 15: ...4 MEMO ...
Page 21: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 27: ...2 6 2 INSTALLATION MEMO ...
Page 61: ...5 8 5 PARAMETERS MEMO ...
Page 73: ...7 2 7 INSPECTION MEMO ...
Page 81: ...8 8 8 TROUBLESHOOTING MEMO ...
Page 87: ...9 6 9 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 91: ...10 4 10 CHARACTERISTICS MEMO ...
Page 111: ...11 20 11 OPTIONS AND AUXILIARY EQUIPMENT MEMO ...







































































