





























80
4.4.3
Adjusting the speed control gain (Pr.820, Pr.821, X44 signal)
The above parameters can be set when
Pr.160 Extended function display selection
= "0".
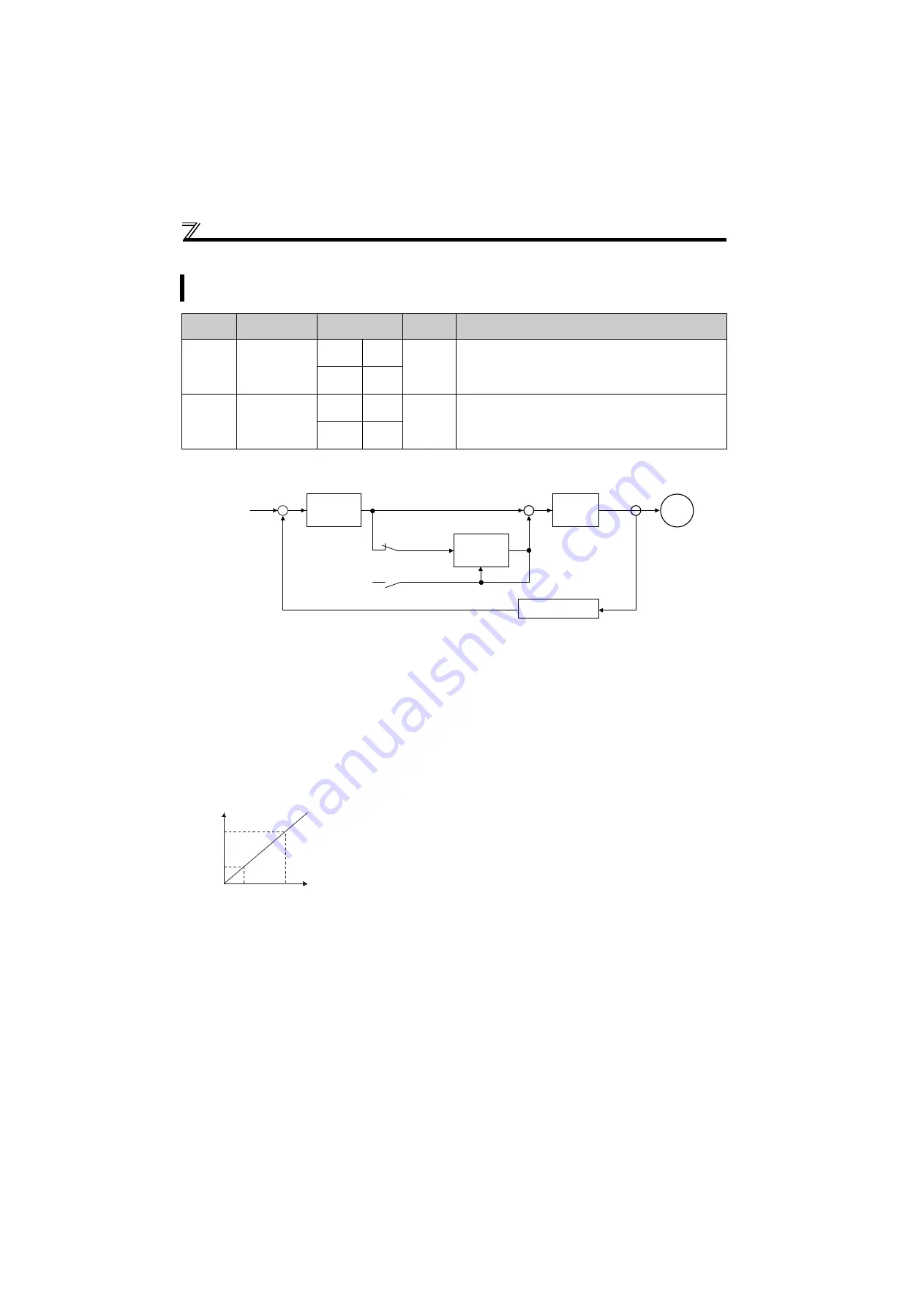
(1) Control block diagram
(2) P/PI switchover (X44 signal)
By turning the P/PI control switching signal (X44) ON/OFF, you can select whether to add the integral time (I) or not
when performing gain adjustment with P gain and integral time. Under position control, the X44 signal is invalid. (PI
control is constantly valid.)
When the X44 signal is OFF ............PI control
When the X44 signal is ON ..............P control
For the terminal used for X44 signal input, set "44" in any of
Pr.178 to Pr.184 (input terminal function selection)
to assign
the function.
(3) Adjusting the speed control gain manually
The speed control gain can be adjusted for the conditions such as abnormal machine vibration, acoustic noise, slow
response, and overshoot.
Manual adjustment of gain is useful to exhibit the optimum performance of the machine or to improve unfavorable
conditions such as vibration and acoustic noise during the operation with high load inertia or gear backlashes.
Parameter
number
Name
Initial value
Setting
range
Operation
820
Speed control
P gain
0.75K or
lower
100%
0 to 1000%
The proportional gain during speed control is set. (Setting this
parameter higher improves the trackability for speed command
changes. It also reduces the speed fluctuation due to a load
fluctuation.) 100% is equivalent to 200rad/s.
1.5K or
higher
15%
821
Speed control
integral time
0.75K or
lower
0.2s
0 to 20s
The integral time during speed control is set. (Setting this parameter
lower shortens the return time to the original speed when the speed
fluctuates due to a load fluctuation.)
1.5K or
higher
0.333s
Pr.820 Speed control P gain
higher speeds up the response, but setting this too
high causes vibration and acoustic noise.
Setting
Pr.821 Speed control integral time
lower shortens the return time to the
original speed at a speed fluctuation, but setting it too low causes overshoot.
Motor
Estimated speed
+
-
Speed
proportional
operation
+
+
Speed
command
Pr.820 Speed control P gain
Speed
integral
operation
Pr.821 Speed control integral time
Torque
control
Speed estimator
X44
X44
0
Integration
cleared to 0
Pr.820
Setting
100%
15%
Speed response of
the motor alone
200rad/s
30rad/s
Summary of Contents for FR-E700EX
Page 11: ...VII MEMO ...
Page 23: ...12 MEMO ...
Page 288: ...286 MEMO ...
Page 302: ...300 MEMO ...
Page 314: ...312 MEMO ...







































































