





























77
Before operation
4.3.12 To perform high accuracy/fast response operation (gain adjustment of real
sensorless vector control and vector control) (Pr. 818 to Pr. 821, Pr. 880)
(1) Easy gain tuning execution procedure (
Pr. 819
= "1" load inertia ratio automatic estimation)
Easy gain tuning (load inertia ratio automatic
estimation) is valid only in the speed control or
position control mode under vector control.
It is invalid under torque control, V/F control,
advanced magnetic flux vector control and real
sensorless vector control.
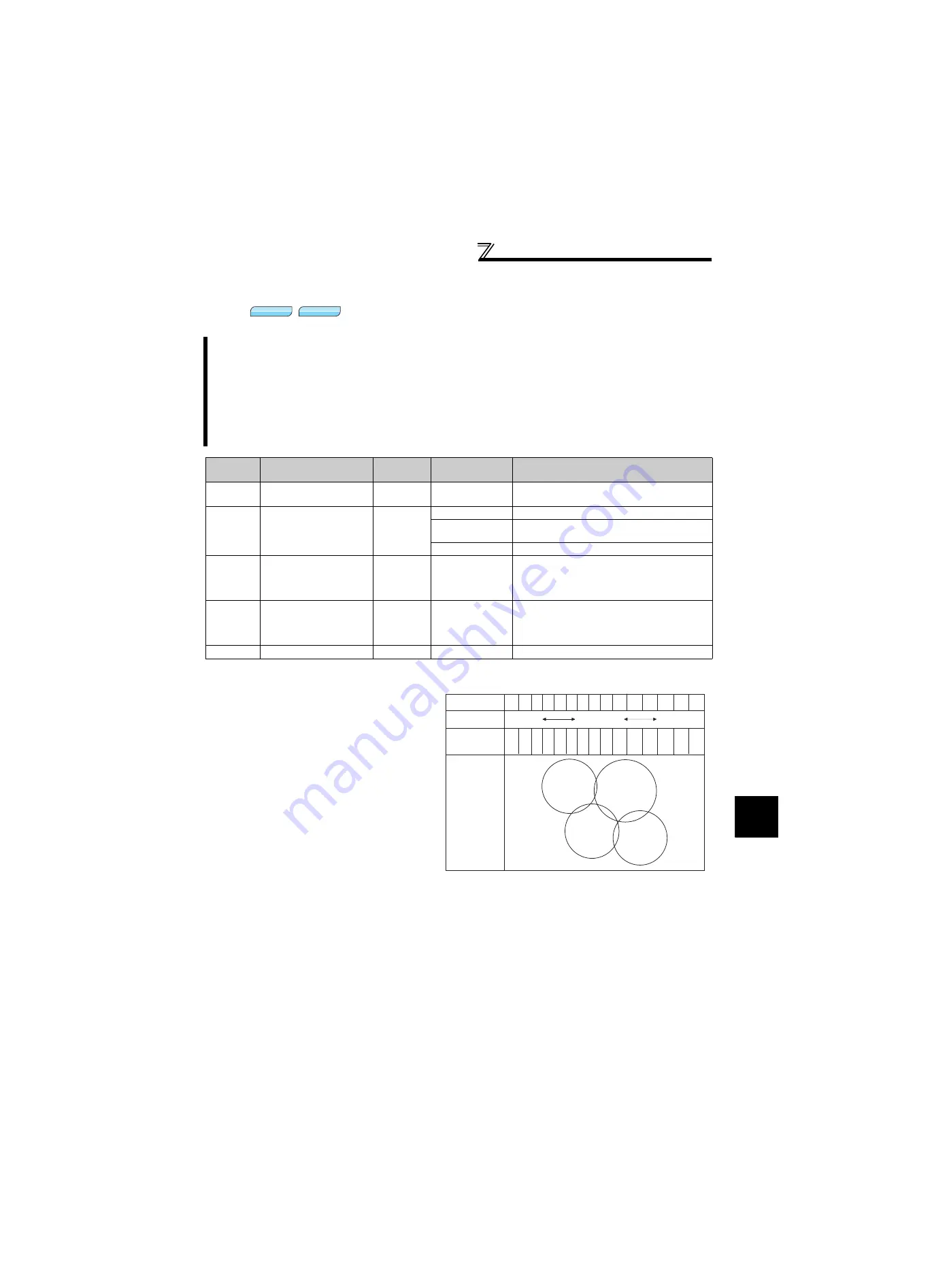
1) Set the response level using
Pr. 818 Easy gain
tuning response level setting
.
Refer to the diagram on the right and set the
response level.
Increasing the value will improve trackability
to the command, but too high value will
generate vibration. The relationship between
the setting and response level are shown on
the right.
The ratio of the load inertia to the motor inertia (load moment of inertia) is estimated in real time from the torque
command and speed during motor operation by vector control. As optimum gain of speed control and position
control are automatically set from the load inertia ratio and response level, time and effort of making gain
adjustment are reduced. (Easy gain tuning)
When the load inertia ratio can not be estimated due to load fluctuation or real sensorless vector control is
exercised, control gain is automatically set by manually inputting the load inertia ratio.
Make a manual input adjustment when vibration, noise or any other unfavorable phenomenon occurs due to
large load inertia or gear backlash, for example, or when you want to exhibit the best performance that matches
the machine.
Parameter
Number
Name
Initial Value
Setting Range
Description
818
Easy gain tuning
response level setting
2
1 to 15
Set the response level.
1: Slow response to 15: Fast response
819
Easy gain tuning
selection
0
0
Without easy gain tuning
1
With load estimation, with gain calculation
(valid only during vector control)
2
With load
(Pr. 880)
manual input, gain calculation
820
Speed control P gain 1
60%
0 to 1000%
Set the proportional gain for speed control.
(Increasing the value improves trackability in
response to a speed command change and
reduces speed variation with disturbance.)
821
Speed control integral
time 1
0.333s
0 to 20s
Set the integral time during speed control.
(Decrease the value to shorten the time taken for
returning to the original speed if speed variation
with disturbance occurs.)
880
Load inertia ratio
7 times
0 to 200 times
Set the load intertia ratio to the motor.
Sensorless
Sensorless
Sensorless
Vector
Vector
Vector
Pr. 818
setting
Guideline of
mechanical resonance
frequency (Hz)
Response level
8
10 12 15 18 22 28 34 42 52 64 79
98 122 150
1
2
3
4
5
6 7
8
9 10 11 12
13 14 15
Slow
response
Fast
response
Middle
response
Large conveyor
Arm robot
Precision
machine tool
General machine tool,
conveyor
Summary of Contents for FR-A741-11K
Page 7: ...MEMO ...
Page 216: ...209 MEMO ...






































































