





























Lite-On Technology Corp.
Industrial Automation
37
3.3.2.
CN1 I/O Connector signal
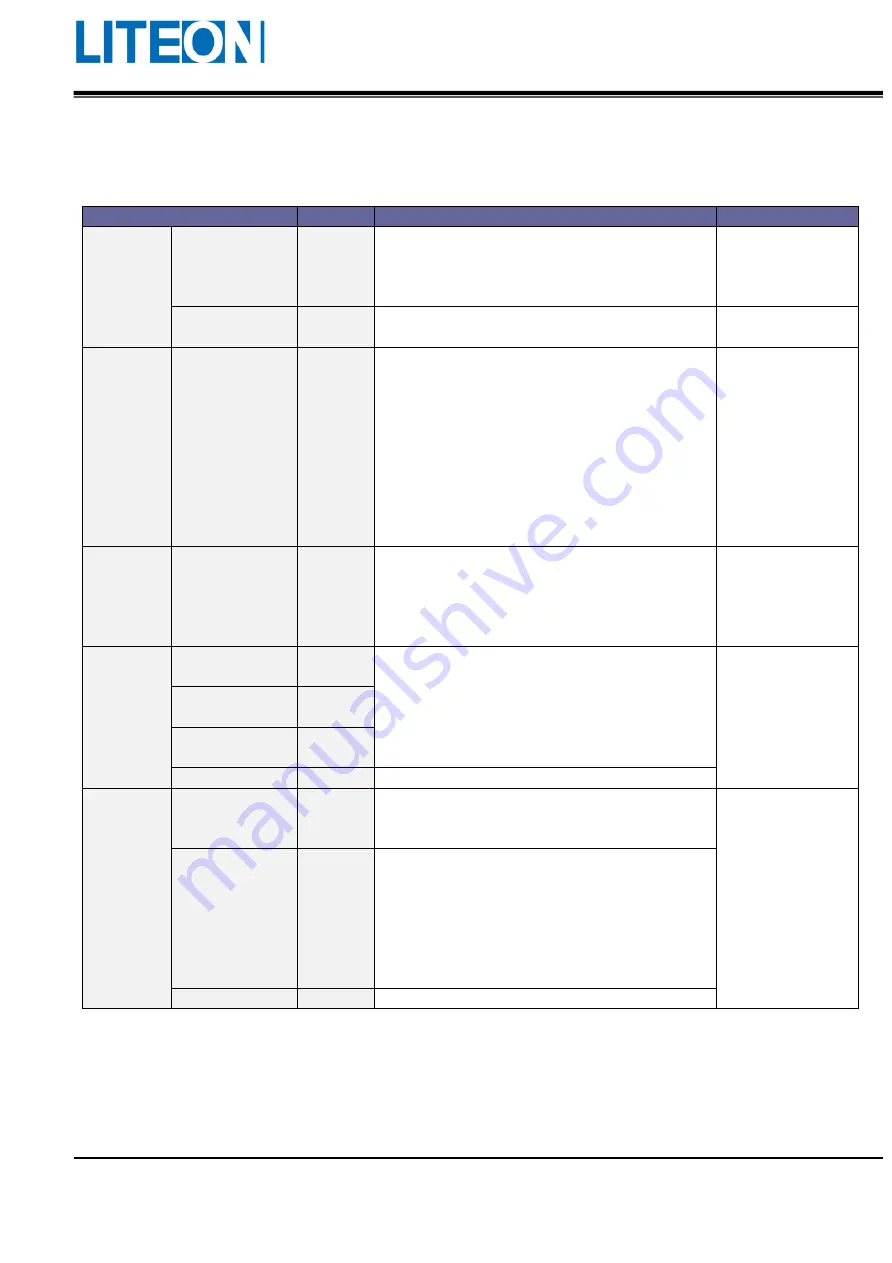
General signal
Name
Pin No
Function
Remark
Analog
command
(input)
V Ref
20
(1) The speed command of the motor -10V ~ +10V
indicates the rotation speed -3000~ +3000 r/min
(default). The corresponding range can be changed
via the parameter.
T Ref
18
The torque command of the motor
-10V ~ +10V
indicates the rated torque command -100% ~+100%.
Position
pulse
command
(input)
OUT+
OUT-
DIR+
DIR-
OPC(PULL HI)
43
41
39
37
35
The
position pulse can be input via the line driver
(maximum single-phase pulse frequency 500KHz) or
open collector (maximum single-phase pulse
frequency 200KHz). Three command forms are
available (forward reverse pulse, pulse and direction,
as well as AB phase pulse) and can be selected via the
parameter.
When the position pulse is input via the open
collector, the terminal must be connected to an
external power supply for level increasing.
High speed
position
pulse
command
(input)
HOUT+
HOUT-
HDIR+
HDIR-
38
36
42
40
The high speed position pulse only allows the input
via the line driver (+5V). The maximum single-phase
pulse frequency is 4 MHz. For the command forms,
three pulse types are available, which are AB phase,
CW+CCW, as well as plus and direction.
Position
pulse
command
(output)
EA+
EA-
21
22
The A, B and Z signals of the encoder are output via
the line driver.
EB+
EB-
25
23
EZ+
EZ-
13
24
OZC
44
The encoder Z-phase with the open collector
Power
supply
24V
17
The VDD is the +24V power supply provided by the
drive. It can be used for the DI and DO signals and it
has a resistor of 500mA.
COM+
COM-
11
14
The COM+ is the command end for DI voltage input.
When the VDD is used for the voltage, the VDD must
be connected to COM+. If the VDD is not used, the
user must provide the external power supply (+12V ~
+24V). The positive pole of the external power
supply must connect to COM+ and the negative pole
to COM-.
S GND
19
Grounding of the analog input signal







































































