





























Lite-On Technology Corp.
Industrial Automation
187
the selected command, refer to the description in the chapter for each single mode.
7.5.
Others
7.5.1.
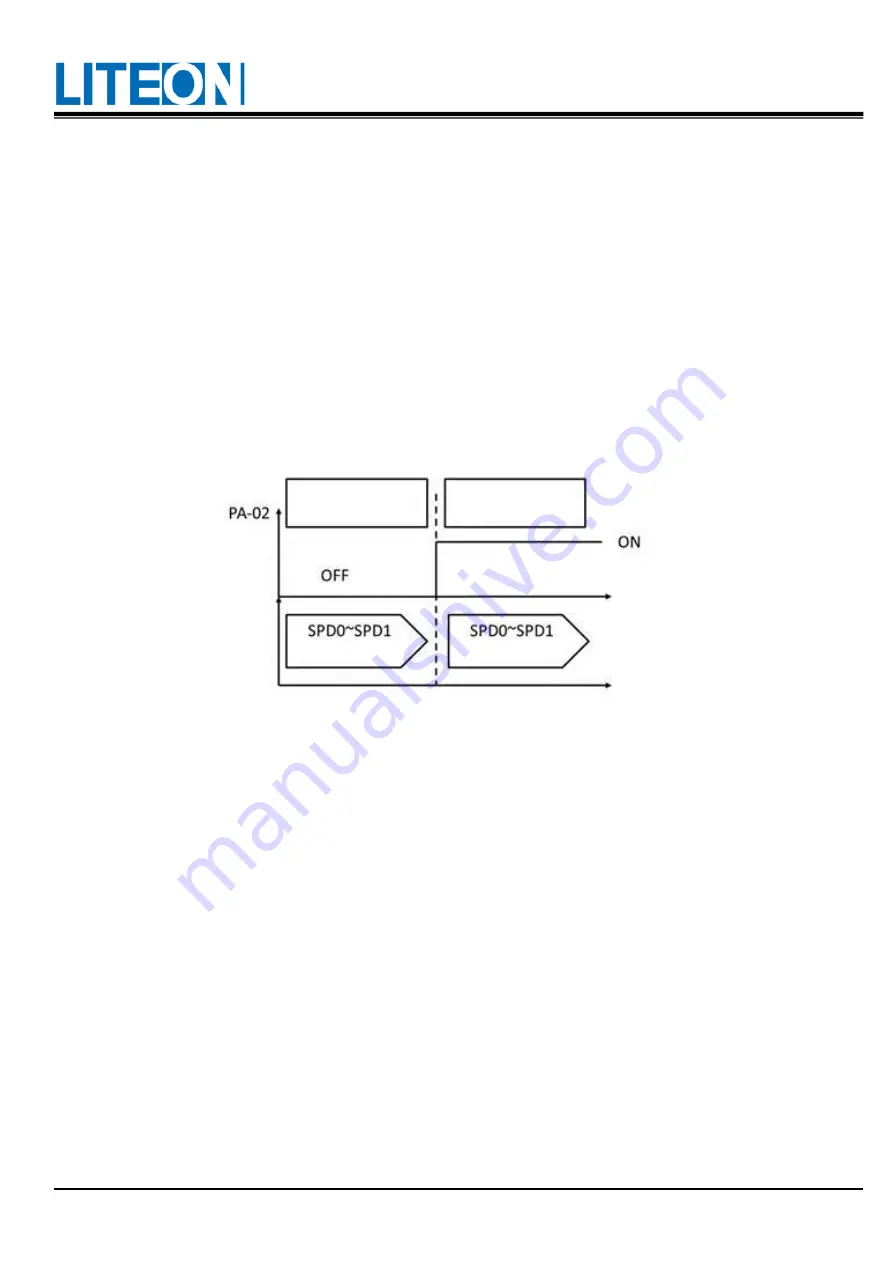
Use of the speed limit
In the position, speed, torque and other modes (if available), the maximum speed limit is restricted by
the internal parameter PA-07. The speed limit and command can be passed down in the same way,
which is through the external analog voltage or internal parameter (PA-14~PA-16). Refer to 7.3.1. The
speed limit is only allowed in the torque mode and it is used to restrict the motor rotation speed. If the
external analog voltage is adopted for the torque command, extra DI signals are available. These signals
can be regarded as SPD0~SPD1 and utilized to select the speed limit command. If number of DI signals
is insufficient, the speed limit command can also be input via the analog voltage. The speed limit is
activated when PA-02 us set to 1. The following shows the diagram:
7.5.2.
Use of the torque limit
The speed limit and command can be passed down in the same way, which is through the external
analog voltage or internal parameter (PA-03~PA-05). Refer to 7.4.1. The speed limit is effective in the
position or speed mode and it is used to restrict the motor torque output. If the external pulse is adopted
for the position command or the external analog voltage is adopted for the speed mode, extra DI signals
are available. These signals can be regarded as TCM0~TCM1 and utilized to select the torque limit
command. If number of DI signals is insufficient, the torque limit command can also be input via the
analog voltage. The speed limit is activated when PA-02 us set to 1. The following shows the diagram:
Disabling of maximum
speed limit
Activation of
maximum speed limit
Effective
Ineffective







































































