





























User Manual of EL6-CAN AC Servo
www.leadshine.com
35
during delay time with the 2nd gain.
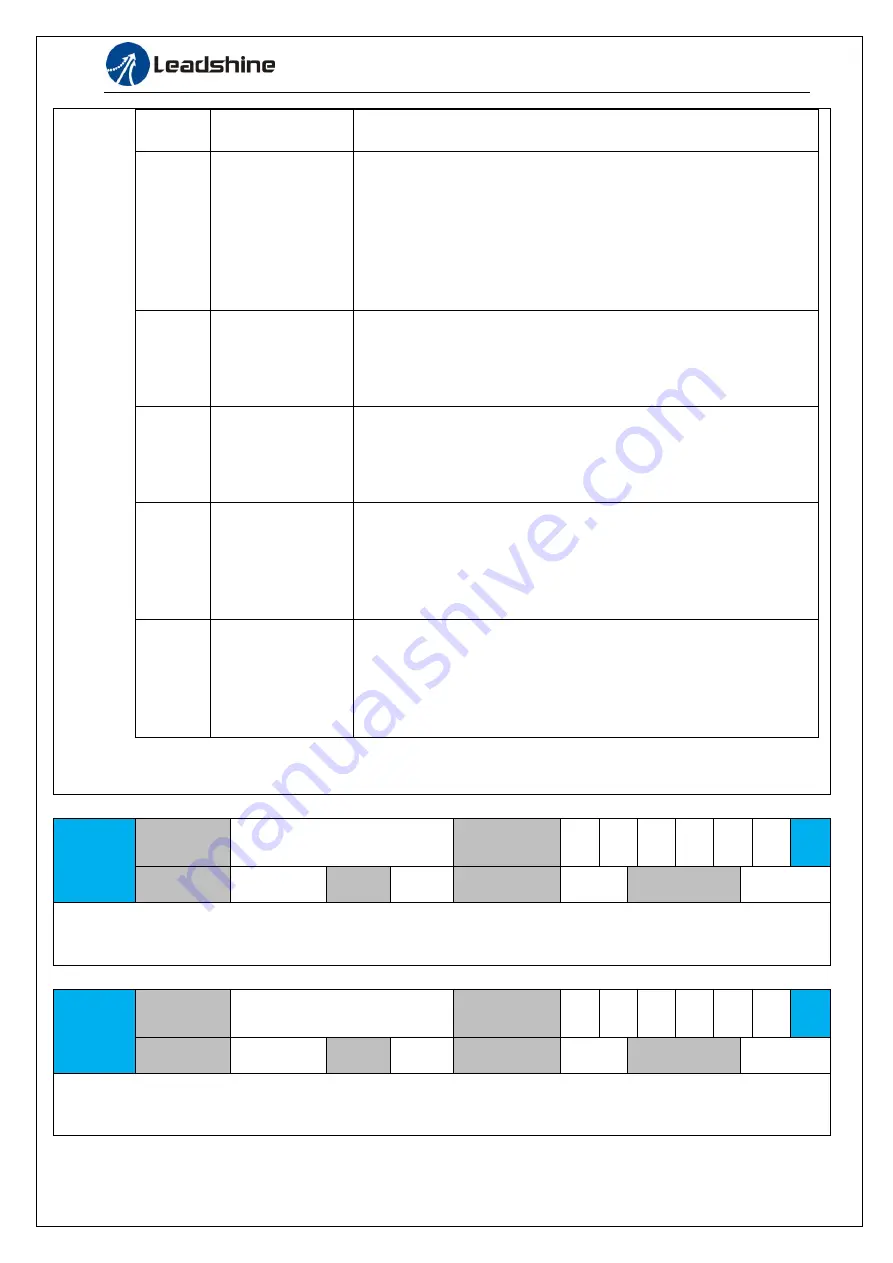
6
Position deviation
is large
Valid for position control.
Shift to the 2nd gain when the absolute value of the positional
deviation exceeded (level + hysteresis)[pulse] previously with the
1st gain.
Return to the 1st gain when the absolute value of the positional
deviation was kept below (level + hysteresis)[r/min]previously
during delay time with the 2nd gain.
Unit of level and hysteresis [pulse] is set as the encoder resolution
for positional control.
7
position command
exists
Valid for position control.
Shift to the 2nd gain when the positional command was not 0
previously with the 1st gain.
Return to the 1st gain when the positional command was kept 0
previously during delay time with the 2nd gain.
8
Not in positioning
complete
Valid for position control.
Shift to the 2nd gain when the positioning was not completed
previously with the 1st gain.
Return to the 1st gain when the positioning was kept in completed
condition previously during delay time with the 2nd gain.
9
Actual speed is
large
Valid for position control.
Shift to the 2nd gain when the absolute value of the actual speed
exceeded (level + hysteresis) (r/min) previously with the 1st gain.
Return to the 1st gain when the absolute value of the actual speed
was kept below (level - hysteresis) (r/min) previously during delay
time with the 2nd gain.
10
Have position
cactual
speed
Valid for position control.
Shift to the 2nd gain when the positional command was not 0
previously with the 1st gain.
Return to the 1st gain when the positional command was kept at 0
during the delay time and the absolute value of actual speed was
kept below (level - hysteresis) (r/min) previously with the 2nd gain.
In position control mode, setup Pr1.15=3,5,6,9,10;
In speed control mode, setup Pr1.15=3,5,9;
Pr1.17
Name
Level of position control
switching
Mode
F
Range
0~20000
Unit
Mode
specific
Default
50
Index
2117h
Unit of setting varies with switching mode.
switching condition: position :encoder pulse number ; speed : r/min ; torque : % .
Notice:
set the level equal to or higher than the hysteresis.
Pr1.18
Name
Hysteresis at position control
switching
Mode
F
Range
0~20000
Unit
Mode
specific
Default
33
Index
2118h
Combining Pr1.17(control switching level)setup
Notice:
when level< hysteresis, the hysteresis is internally adjusted so that it is equal to level.