



















10
Chapter 2
– Specifications
XtrapulsCD1-a
Max. motor speed
Adjustable from 100 rpm to 25000 rpm
Speed range
1 : 8192 with 14 bits input command resolution
Encoder position output
Two A and B channels in quadrature with 1 marker pulse per
revolution.
RS422 line driver.
Programmable resolution between 64 ppr and 16384 ppr
(according to the motor maximum speed)
Arc minute accuracy = (8 + 5400/Resolution)
Note:
The total position accuracy must take into account the
accuracy of the resolver used.
Resolver input
Resolution: 65536 ppr (16 bit)
Excitation frequency: 8 kHz
Transformation ratio: 0.3 to 0.5 (other values need factory-set
adjustment)
Encoder input
Software selectable:
Quadrature signals A & B with Z marker pulse
RS 422 line receiver
Maximum pulse frequency: 1 MHz
Resolution: 500 to 10
6
ppr
Incremental Sin/Cos encoder
Heidenhain 1Vcc Sin/Cos type or compliant
Maximum signal frequency: 200 kHz
Resolution: 500 to 10
6
ppr
Interpolation factor : 1024
Absolute single-turn Sin/Cos encoder
Heidenhain ERN 1085 or compliant
Maximum signal frequency: 200 kHz
Resolution: 2048 or 512 ppr
Interpolation factor : 1024
PULSE
and
DIRECTION
input
Re-configuration of the encoder input for stepper motor
emulation:
Line receiver RS-422
Maximum pulse frequency: 1 MHz
Resolution: 200 to 10
6
pitch/revolution
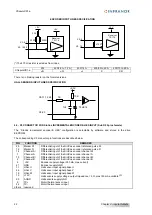
Hall sensors input
Selectable by software : 120° or 60° HES type
5 V or 12 V supply voltage
HES sequence error detection
Logic inputs
Enable / Disable: ENABLE
Limit : FC+
Limit switch - : FC-
Current command: CI
Zero speed input command / Phasing command: CV0
Fault RESET
Logic outputs
"AOK" relay contact
Umax = 50 V, Imax = 100 mA, Pmax = 10 W
"AOK": closed if drive OK, open if fault
Motor BRAKE control 1.5 A maximum with 24 Vdc.
Open collector protected against short circuits.
The brake is controlled when the motor is enabled: ENABLE
activated and no fault displayed.
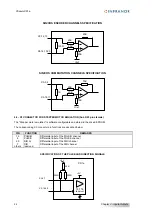
Analog output
+/-10 V, resolution: 8 bit, load: 10 mA, linearity: 2%, low pass
filter: 170 Hz, programmable output signal: Channel 1 of the







































































