






















Honeywell
Parameter Descriptions
73
10
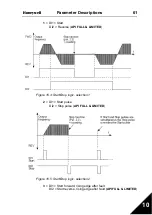
Figure 10.14: Motor temperature calculation
9.11
M
OTOR
PHASE
SUPERVISION
Motor phase supervision of the motor ensures that the motor phases have an
approximately equal current.
Settings for P9.11, range 0-2:
Activation mode
Description
0
No
response
1
Warning
2
Fault, stop mode after fault according to ID506 (P2.3 Stop
function)
105%
par. 9.7
Q = (I/IT)
2 x (1-e-t/T)
I/I
T
Trip area
Motor temperature
Time
Motor temperature
Time constant T*)
*)
Changes by motor size and
adjusted with parameter 9.10
Fault/warning
Motor
current







































































