





























14
Installation
Honeywell
4
4. INSTALLATION
4.1 MECHANICAL INSTALLATION
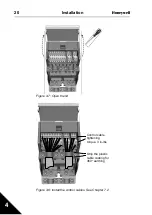
There are two possible ways to mount the SmartVFD COMPACT to the wall; either
screw or DIN-rail mounting. The mounting dimensions are given on the back of the
drive and on the following page.
Figure 4.1: Screw mounting
Figure 4.2: DIN-rail mounting
MI2-3
MI1
=M 4
=M 5
1
2







































































