
























Honeywell
Parameter Descriptions
71
10
9.5
U
NDERLOAD
PROTECTION
0
= No response
1
= Alarm
2
= Fault, stop according to P2.3
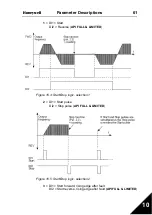
The purpose of the motor underload protection is to ensure that there is load
on the motor when the drive is running. If the motor loses its load there might
be a problem in the process, e.g. a broken belt or a dry pump.
The underload protection time limit is 20 seconds, which is the maximum time
allowed for an underload state to exist before causing a trip according to this
parameter.
Figure 10.12: Underload protection
9.7
T
HERMAL
PROTECTION
OF
THE
MOTOR
0
= No response
1
= Warning
2 =
Fault, stop mode after fault according to parameter 2.3
If tripping is selected the drive will stop and activate the fault stage. Deactivat-
ing the protection, i.e. setting parameter to 0, will reset the thermal model of
the motor to 0%.
9.8
M
OTOR
AMBIENT
TEMPERATURE
When the motor ambient temperature must be taken into consideration, it is
recommended to set a value for this parameter. The value can be set between
-20 and 100 degrees Celsius.
Underload curve at
zero freq. = 10%
f
5 Hz
Underload curve at
nominal freq. = 50%
Field weakening
point, P1.11
Underload area
Torque







































































