




























64
Parameter Descriptions
Honeywell
10
4.5
D
C
BRAKING
TIME
AT
START
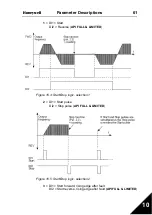
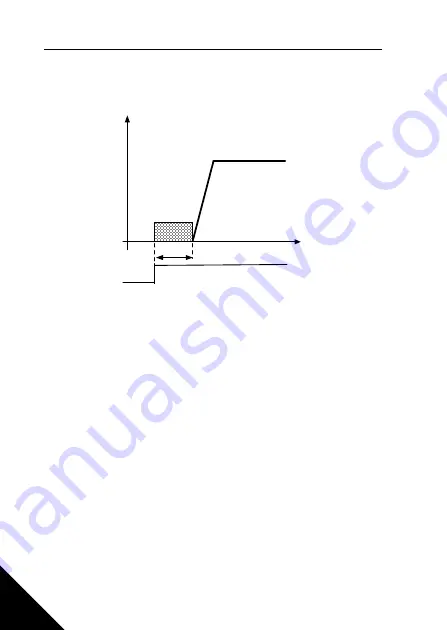
DC-brake is activated when the start command is given. This parameter de-
fines the time before the brake is released. After the brake is released, the out-
put frequency increases according to the set start function by par. 2.2.
Figure 10.7: DC braking time at start
4.6
F
REQUENCY
TO
START
DC
BRAKING
DURING
RAMP
STOP
The output frequency at which the DC-braking is applied. See Figure 10.9.
4.7
DC
BRAKING
TIME
AT
STOP
0
= DC brake is not in use
>0
= DC brake is in use and its function depends on the Stop function,
(par. 2.3). The DC braking time is determined with this parameter.
Par. 2.3 = 0 (Stop function = Coasting):
After the stop command, the motor coasts to a stop without control from the
frequency converter.
With the DC injection, the motor can be electrically stopped in the shortest
possible time, without using an optional external braking resistor.
The braking time is scaled by the frequency when the DC-braking starts. If the
frequency is greater, or equal to the nominal frequency of the motor, the set
value of parameter 4.7 determines the braking time. For example, when the
frequency is 10% of the nominal, the braking time is 10% of the set value of
parameter 4.7.
t
Par 4.5
RUN
STOP
Output
frequency







































































