





























Chapter 7 Specifications
7 - 1
7.1 Specifications
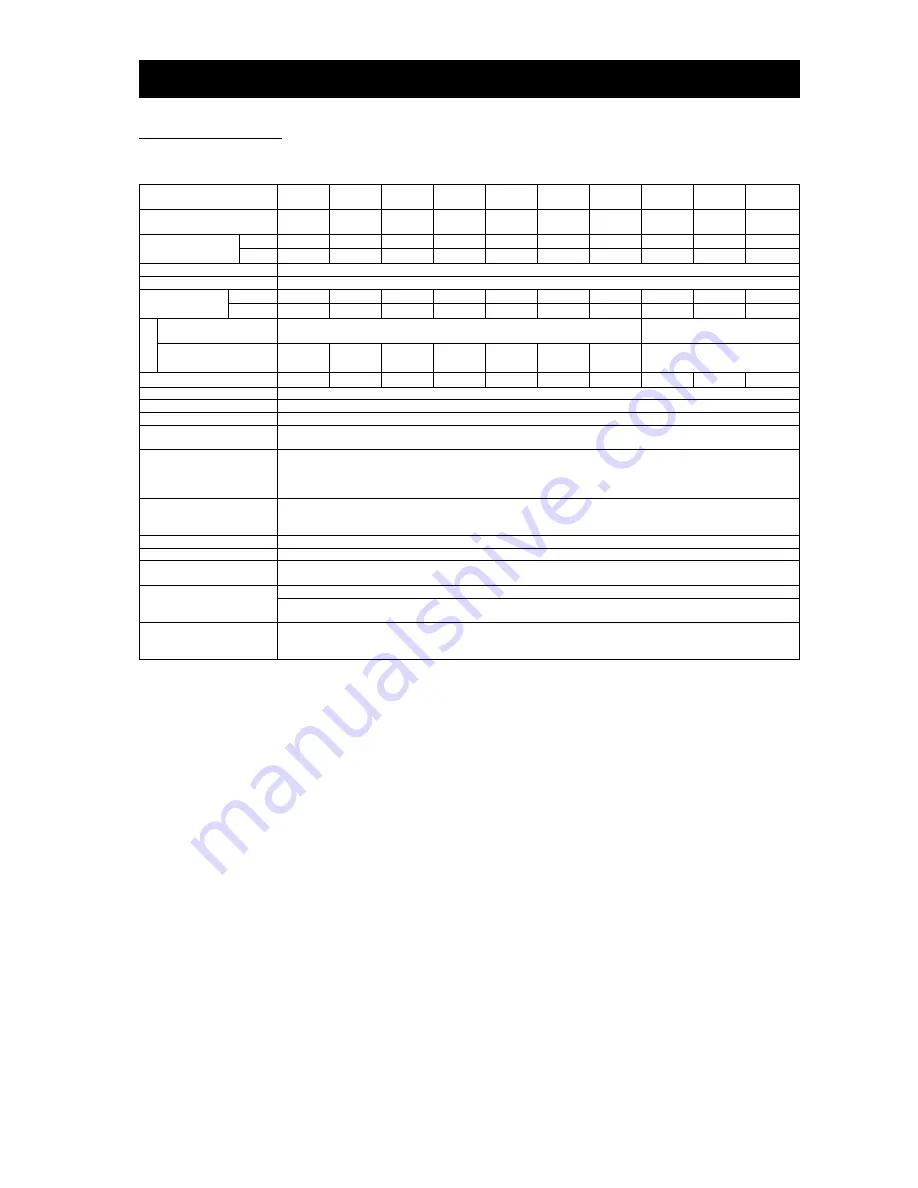
(1) Specifications of the 400 V class model
Model name (type name)
SJ700B
-□□□
HFF
055 075 110 150 185 220 300 370 450 550
Max. applicable motor
capacity (4-pole) (kW)
5.5 7.5 11 15 18.5 22 30 37 45 55
Rated capacity
(kVA)
400V
8.3 11.0 15.2 20.9 25.6 30.4 39.4 48.4 58.8 72.7
480V
9.9 13.3 18.2 24.1 30.7 36.5 47.3 58.1 70.6 87.2
Rated input AC voltage
Three-phase (3-wire), 380 to 480 V (+10%, -15%), 50/60 Hz (±5%)(note3)
Rated output voltage
Three-phase (3-wire), 380 to 480 V (corresponding to the input voltage)
Rated output
current (A)
(Note1)
14 17 23 30 39 45 60 72 88 105
(Note2)
14 16 22 29 37 43 57 70 85 105
Braking
Regenerative braking
Internal BRD circuit (external discharge resistor)
External regenerative braking
unit
Minimum connectable
resistance (
Ω
)
70 70 70 50 35 35 35
-
Approx.
weight
(kg) 3.5 6 6 6 14 14 22 22 30 30
Protective structure
IP20
Control system
Sine-wave PWM control
Output frequency range
0.1 to 400 Hz
Frequency accuracy
Within ±0.01% of the maximum output frequency for digital input, within ±0.2% of maximum frequency
for digital input (at 25±10
°
C)
Frequency setting
resolution
Digital input: 0.01 Hz
Analog input: Maximum output frequency/4000
(O terminal input: 12 bits/0 to +10 V, O2 terminal input: 12 bits/-10 to +10 V, OI terminal input: 12 bits/0
to +20 mA)
Voltage/frequency
characteristic
V/f characteristic variable with the base frequency set between 30 to 400 Hz, constant- or
reduced-torque V/f control, sensorless vector control, 0Hz-range sensorless vector control
(set the carrier frequency less than 3kHz)
Speed fluctuation
±
0.5% (with sensorless vector control or 0Hz-range sensorless vector control)
Rated overload current
150%/60 seconds, 200%/3 seconds
Acceleration/deceleration
time
0.01 to 3,600.0 seconds (in linear or curved pattern)
Starting torque
150%/0.5Hz (with sensorless vector control or 0Hz-range sensorless vector control)
120%/0Hz-range torque (with 0Hz-range sensorless vector control or with a motor of capacity one class
lower than the inverter connected)
DC braking
Triggered at motor start-up, when the actual motor frequency exceeds the acceleration frequency set by
a stop command, when the actual motor frequency exceeds the frequency set by a frequency
command, or by an externally input command (braking force, time, and frequency are variable).
Note 1: The value of this row is that for UL application.
Note 2: The value of this row is that of actual ability.
Summary of Contents for SJ700B SERIES
Page 15: ...Contents xiii Index Index Index 1 ...
Page 17: ......
Page 22: ......
Page 45: ......
Page 59: ......
Page 223: ......
Page 237: ......
Page 245: ......
Page 251: ...Chapter 7 Specifications 7 6 SJ700B 450 to 550HFF 5 Cable hole φ41 ...
Page 253: ......







































































