





























Electronic gearing allows the geared motor to perform a second independent or coordinated move in addition to
the gearing. For example, when a geared motor follows a master at a ratio of 1:1, it may be advanced an additional
distance with PR, or JG, commands, or VP, or LI.
Ramped Gearing
In some applications, especially when the master is traveling at high speeds, it is desirable to have the gear ratio
ramp gradually to minimize large changes in velocity on the slave axis when the gearing is engaged. For example if
the master axis is already traveling at 500,000 counts/sec and the slave will be geared at a ratio of 1:1 when the
gearing is engaged, the slave will instantly develop following error, and command maximum current to the motor.
This can be a large shock to the system. For many applications it is acceptable to slowly ramp the engagement of
gearing over a greater time frame. Galil allows the user to specify an interval of the master axis over which the
gearing will be engaged. For example, the same master X axis in this case travels at 500,000 counts/sec, and the
gear ratio is 1:1, but the gearing is slowly engaged over 30,000 counts of the master axis, greatly diminishing the
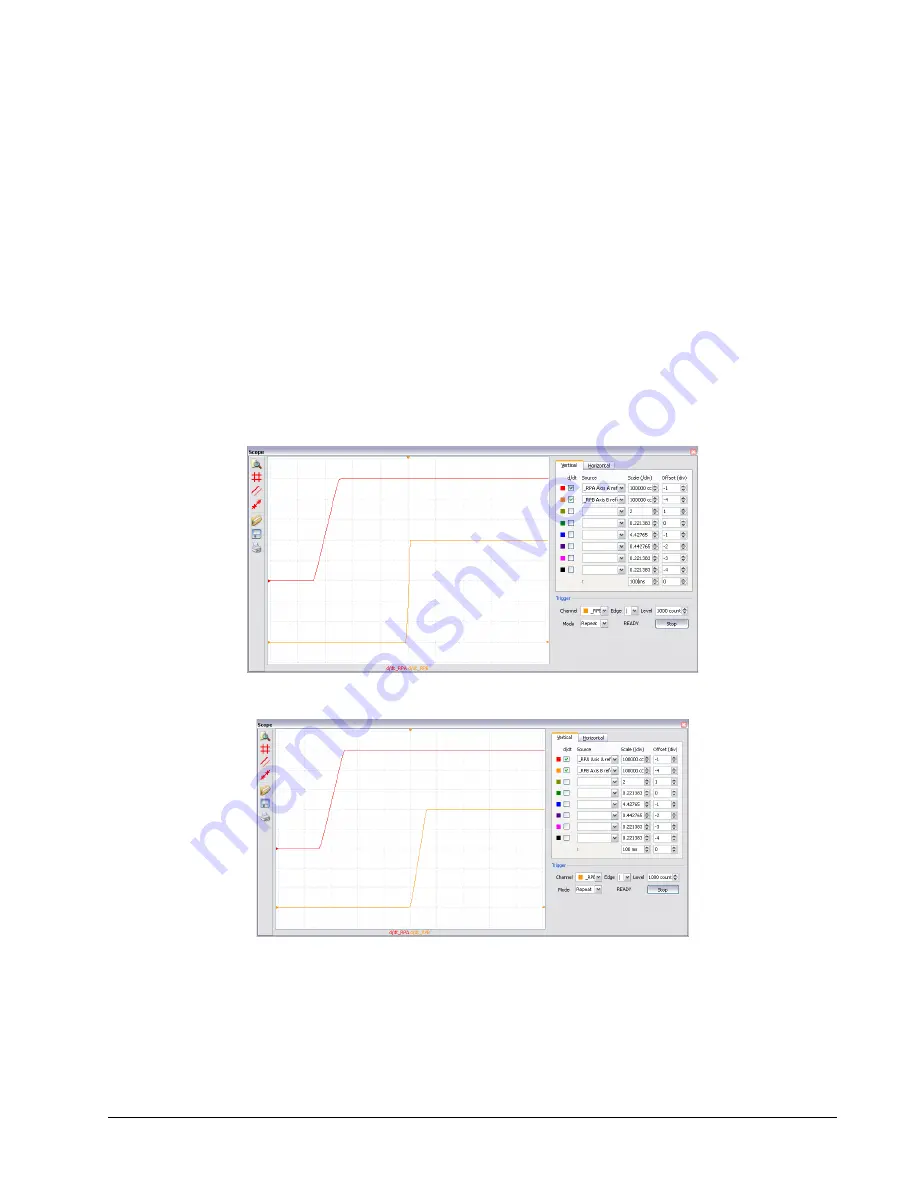
initial shock to the slave axis. Figure 6.12 below shows the velocity vs. time profile for instantaneous gearing.
Figure 6.14 shows the velocity vs. time profile for the gradual gearing engagement.
The slave axis for each figure is shown on the bottom portion of the figure; the master axis is shown on the top
portion. The shock to the slave axis will be significantly less in Figure 6.14 than in Figure 6.12. The ramped gearing
does have one consequence. There isn’t a true synchronization of the two axes, until the gearing ramp is complete.
The slave will lag behind the true ratio during the ramp period. If exact position synchronization is required from
the point gearing is initiated, then the position must be commanded in addition to the gearing. The controller
Chapter 6 Programming Motion ▫ 74
DMC-42x0 User Manual
Figure 6.11: Velocity counts/sec vs. Time (msec) Instantaneous Gearing Engagement
Figure 6.12: Velocity (counts/sec) vs. Time (msec) Ramped Gearing
Summary of Contents for DMC-42 0 Series
Page 195: ...ICM 2900 PCB Layout Appendices 191 DMC 42x0 User Manual...
Page 205: ...CB 50 100 Drawings Appendices 201 DMC 42x0 User Manual...
Page 206: ...Appendices 202 DMC 42x0 User Manual...
Page 207: ...Appendices 203 DMC 42x0 User Manual...
Page 208: ...Appendices 204 DMC 42x0 User Manual...
Page 209: ...Appendices 205 DMC 42x0 User Manual...
Page 210: ...Appendices 206 DMC 42x0 User Manual...
Page 211: ...Appendices 207 DMC 42x0 User Manual...
Page 214: ...CB 50 80 Drawing Appendices 210 DMC 42x0 User Manual...





















































