




























Setup & Operation 5. Motion Range
68
E2C Rev.6
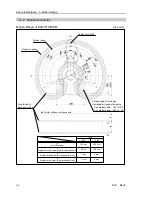
5.4.2 Multiple Mountings
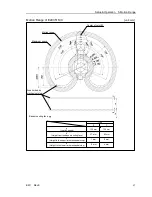
Motion Range of E2C35
1
SM/CM
[unit: mm]
Type
SM CM
a
(Joint #3 stroke)
1
20 mm
1
00 mm
b
(Height from the center of base reference hole)
83 mm
1
08 mm
c
(Height to the upper limit mechanical stop)
7 mm
5 mm
d
(Height to the lower limit mechanical stop)
11
mm
4 mm
Center of Joint #3
Maximum space
Motion range
Area limited by
mechanical stop
+X
+Y
Center of base reference hole
Setting value of Cartesian
(rectangular) range at shipping
X coordinate axis:
-
1
60 to
1
60
Y coordinate axis:
-
350 to
-
50
Summary of Contents for E2C Series
Page 1: ...SCARA ROBOT E2C series MANIPULATOR MANUAL Rev 6 EM069R1409F ...
Page 2: ...MANIPULATOR MANUAL E2C series Rev 6 ...
Page 8: ...vi E2C Rev 6 ...
Page 14: ......
Page 82: ......
Page 92: ...Maintenance 2 General Maintenance 80 E2C Rev 6 ...
Page 118: ...Maintenance 4 Replacing the Cable Unit 106 E2C Rev 6 ...
Page 194: ...Maintenance 11 Replacing the Signal Relay Board 182 E2C Rev 6 ...