





























Parameter x.00
Parameter
protocol
Performance
5.10
Direct
firing
5.07
Motor
rated
curren
5.09
Armature
rated
voltag
5.44
Bridge
request
5.21
Quadrant
5.22
Quadrant
Slave
status
Slave
status
5.26
Continuous
5.28
5.23
Quadrant
5.24
Quadrant
control
Slave
status
Field
Field
flux
per
invert
0
equals
fully
phased
forward.
The
average
measured
DC
output
voltage
seen
across
the
drive
A1
and
A2
terminals
or
the
average
measured
DC
output
voltage
seen
across
the
Power
=
Armature
voltage
x
Armature
current.
Menu
5
Parameter
structure
Keypad
and
description
format
Advanced
parameter
descriptions
Serial
comms
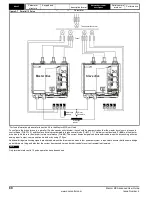
Figure
5-6
Menu
5
armature
control
logic
diagram
Armature
voltage
5.02
Armature
current
Output
power
angle
Direct
firing
angle
enable
5.11
Continuous
back
end
stop
5.13
Armature
firing
angle
4.02
Power
calculation
5.03
Menu
4
5.01
Key
General
5.43
Armature
mode
output
5.12
Autotune
5.45
request
bridge
5.15
Motor
constant
5.46
request
bridge
Quadrant
select
1
enable
2
enable
Input
terminals
Output
terminals
0.XX
0.XX
Read-write
(RW)
parameter
Read-only
(RO)
parameter
5.25
Disable
adaptive
autotune
Field
weakening
compensation
disable
5.47
request
bridge
5.83
enable
reversal
5.84
threshold
3
enable
4
enable
5.32
Motor
amp
torque
5.86
Speed
error
motor.
Selected
by
Pr
5.14.
The
armature
voltage
feedback
has
a
resolution
of
10-bit
plus
sign.
72
Mentor
MP
Advanced
User
Guide
www.onxcontrol.com
Issue
Number:
4
5.02
{di02,
0.45}
Armature
voltage
Coding
Bit
SP
FI
DE
TE
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
1
1
Range
±ARMATURE_VOLTAGE_MAX
V
Update
rate
Background
write
5.01
Armature
firing
angle
Coding
Bit
SP
FI
DE
TE
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
1
1
1
Range
0
to
175.0
°
Update
rate
5.03
Output
power
Coding
Bit
SP
FI
DE
TE
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
2
1
1
1
Range
±POWER_MAX
kW
Update
rate
Background
write







































































