





























Parameter description
protocol
Performance
Menu
12
The
post-brake
release
delay
is
used
to
allow
for
the
brake
release
time.
During
this
period
the
speed
reference
is
held
constant
at
zero,
so
that
there
The
brake
apply
delay
is
used
to
allow
for
the
brake
application
time.
During
this
period
the
Hold
zero
speed
parameter
(Pr
6.08)
is
one,
and
so
the
This
parameter
can
be
used
to
change
the
operating
mode
of
the
drive
when
the
brake
is
released.
The
selected
change
in
operating
mode
takes
When
Pr
12.51
is
0
this
parameter
is
0
when
the
absolute
value
of
the
field
flux
(Pr
5.54)
is
below
80
%
and
1
when
the
absolute
value
of
the
field
flux
When
Pr
12.51
=
0,
Pr
12.50
is
controlled
by
the
internal
field
controller.
Parameter
structure
Keypad
and
format
Advanced
parameter
descriptions
Serial
comms
is
no
sudden
increase
in
motor
speed
when
the
brake
actually
releases.
drive
is
enabled
with
zero
speed
reference.
This
ensures
that
the
motor
remains
stationary
while
the
brake
is
being
applied.
place
after
the
programmed
post
brake
release
delay
and
after
the
programmed
brake
applied
delay.
For
the
default
value
of
0,
no
action
taken.
1
Position
controller
activated.
When
this
parameter
is
set
to
one,
the
position
controller
(see
menu
13)
is
enabled
(Pr
13.10
=
1)
and
the
local
position
reference
source
is
selected
(Pr
13.04
=
4
(LocAL))
during
the
period
when
the
brake
is
released
until
the
end
of
the
delay,
and
again
after
the
brake
is
applied
ready
for
the
next
start.
Provided
the
default
non-absolute
mode
is
selected,
the
position
controller
can
help
to
limit
the
movement
of
the
motor
when
the
brake
is
released.
When
parameter
Pr
12.49
is
changed
from
one
to
zero,
Pr
13.04
and
Pr
13.10
are
automatically
set
to
zero.
2
Jog
override
When
this
parameter
is
set
to
two,
the
jog
inputs
to
the
sequencer
take
priority
over
the
run
inputs
during
the
period
when
the
brake
is
released
until
the
end
of
the
delay,
and
again
after
the
brake
is
applied
ready
for
the
next
start.
This
allows
the
user
to
use
the
jog
reference
to
pick
up
the
load
and
then
switch
to
the
selected
run
reference
when
the
brake
is
off.
(Pr
5.54)
is
above
80
%.
When
Pr
12.51
is
a
1
the
internal
field
controller
does
not
control
this
parameter.
An
external
field
controller
can
then
be
used
to
control
Pr
12.50.
When
Pr
12.51
=
1,
Pr
12.50
is
controlled
by
an
external
field
controller.
Mentor
MP
Advanced
User
Guide
169
Issue
Number:
4
www.onxcontrol.com
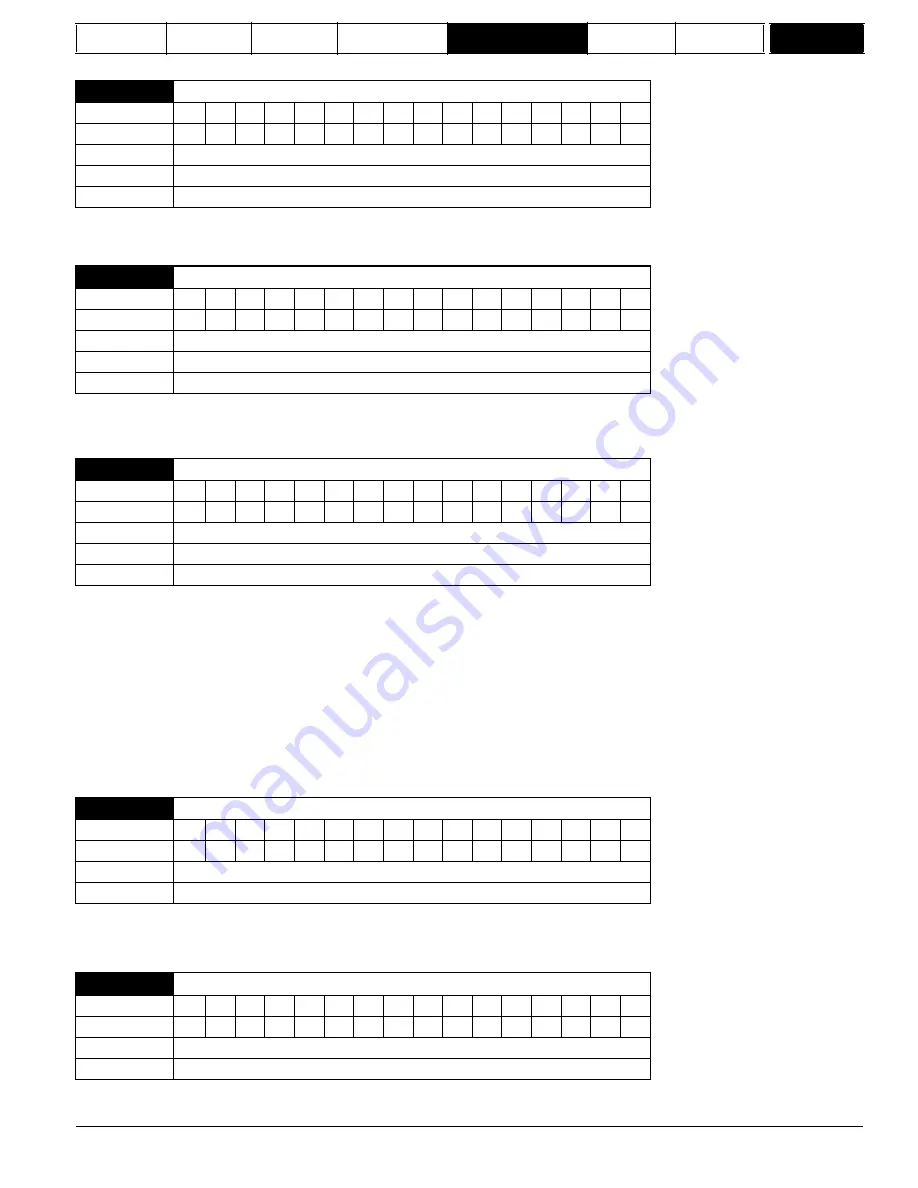
12.48
Brake
apply
delay
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
Range
0.0
to
25.0
s
Default
1.0
s
Update
rate
Background
read
12.49
Brake
release
action
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
Range
0
to
2
Default
0
Update
rate
Background
read
12.47
Post-brake
release
delay
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
1
Range
0.0
to
25.0
s
Default
1.0
s
Update
rate
Background
read
12.50
Field
active
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
Default
0
Update
rate
Background
write/read
12.51
External
field
control
Coding
Bit
SP
FI
DE
Txt
VM
DP
ND
RA
NC
NV
PT
US
RW
BU
PS
1
1
1
Default
0
Update
rate
Background
read







































































