





























Optimization CT MODBUS RTU Technical Data
E300 Design Guide
455
Issue Number: 1
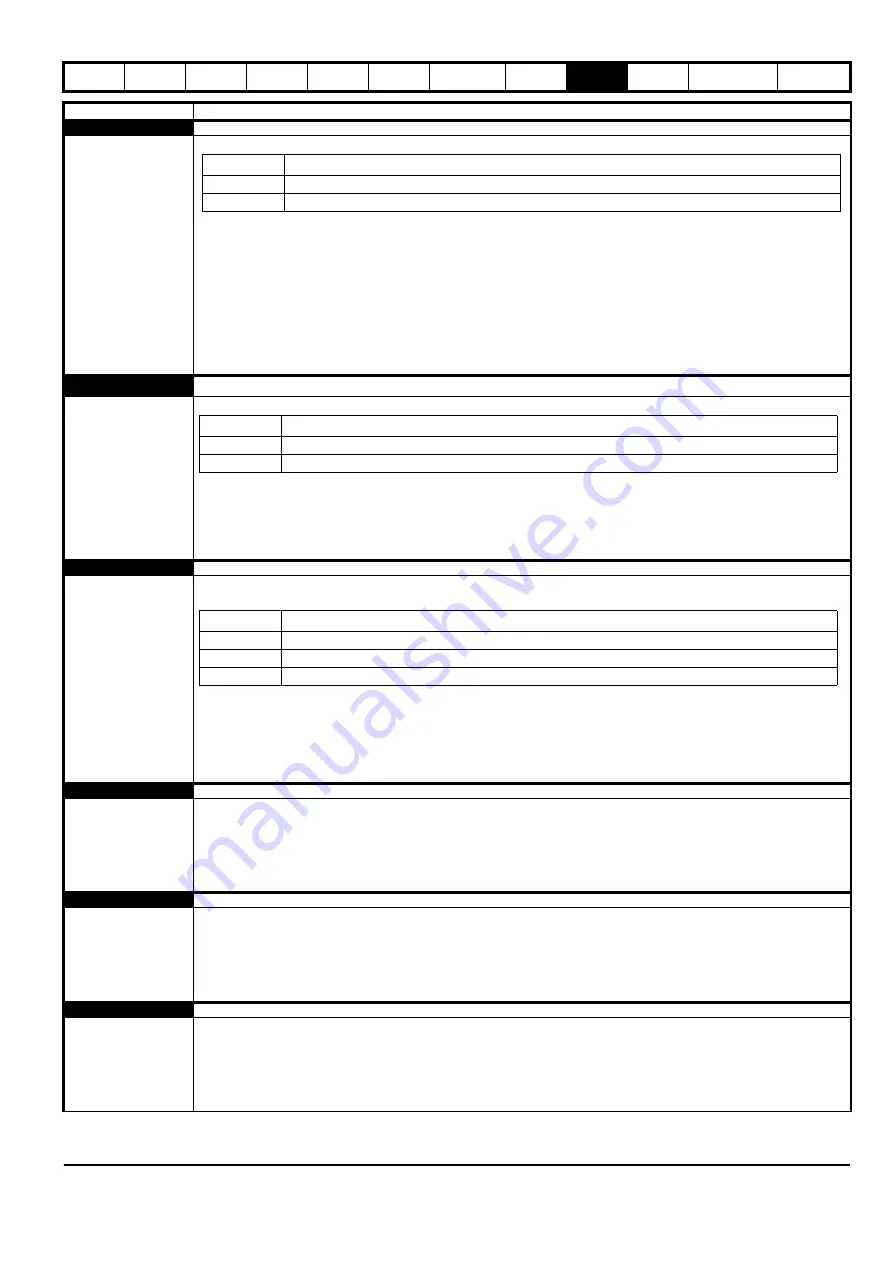
Autotune 1
Position feedback did not change or required speed could not be reached
11
The drive has tripped during an autotune. The cause of the trip can be identified from the sub-trip number.
Recommended actions:
•
Check motor is free to turn i.e. mechanical brake and safety gear are released
•
Check output motor contactor control
•
Check
Drive Encoder Type
(
C01
) is set-up correctly
•
Check
Drive Encoder Rotary Pulses Per Revolution
(
C03
) and
Drive Encoder Voltage Select
(
C04
) are set-up correctly
•
Where a auto configuration compatible encoder is being used select
Drive Encoder Auto Configuration Select
(
C02
)
•
Check the position feedback device wiring is correct
•
Check position feedback mechanical coupling to the motor
•
Check the position feedback in parameter
•
Replace the position feedback device
Autotune 2
Position feedback direction incorrect
12
The drive has tripped during a rotating autotune. The cause of the trip can be identified from the associated sub-trip number.
Recommended actions:
•
Check position feedback device wiring is correct
•
Check motor power cable wiring is correct rotation
•
Rotate the direction of the encoder feedback with
Drive Encoder Feedback Reverse
(
C12
)
•
Rotate any two motor phases or use
Reverse Motor Phase Sequence
(
B26
)
Autotune 3
Measured inertia has exceeded the parameter range or commutation signals changed in wrong direction
13
The drive has tripped during a rotating autotune or mechanical load measurement test. The cause of the trip can be
identified from the associated sub-trip number.
Recommended actions:
•
Check position feedback device wiring is correct
•
Check motor power cable wiring is correct rotation
•
Check motor inertia load
•
Rotate the direction of the encoder feedback with
Drive Encoder Feedback Reverse
(
C12
)
•
Rotate any two motor phases or use
Reverse Motor Phase Sequence
(
B26
)
Autotune 4
Drive encoder U commutation signal fail
14
A position feedback device with commutation signals is being used i.e. AB Servo, FD Servo, FR Servo, SC Servo, or a
Commutation only encoder) and the U commutation signal did not change during a rotating autotune.
Recommended actions:
•
Check position feedback device U commutation signal wiring is connected correctly Encoder terminals 7, 8)
•
Check position feedback device U commutation signal wiring is not damaged
•
Replace position feedback device
Autotune 5
Drive encoder V commutation signal fail
15
A position feedback device with commutation signals is being used i.e. AB Servo, FD Servo, FR Servo, SC Servo, or a
Commutation only encoder) and the V commutation signal did not change during a rotating autotune.
Recommended actions:
•
Check position feedback device V commutation signal wiring is connected correctly Encoder terminals 9, 10)
•
Check position feedback device V commutation signal wiring is not damaged
•
Replace position feedback device
Autotune 6
Drive encoder W commutation signal fail
16
A position feedback device with commutation signals is being used i.e. AB Servo, FD Servo, FR Servo, SC Servo, or a
Commutation only encoder) and the W commutation signal did not change during a rotating autotune.
Recommended actions:
•
Check position feedback device W commutation signal wiring is connected correctly Encoder terminals 11, 12)
•
Check position feedback device W commutation signal wiring is not damaged
•
Replace position feedback device
Trip
Diagnosis
Sub-trip
Reason
1
The position feedback did not change where the position feedback is used during a rotating autotune.
2
Motor did not reach the required speed during a rotating autotune or mechanical load measurement.
Sub-trip
Reason
1
The position feedback direction is incorrect when the position feedback is used during a rotating autotune
2
Motor did not reach the required speed during the rotating autotune or mechanical load measurement.
Sub-trip
Reason
1
Measured inertia has exceeded the parameter range during a mechanical load measurement
2
The commutation signals changed in the wrong direction during a rotating autotune
3
The mechanical load test has been unable to identify the motor inertia.
Summary of Contents for 03200106
Page 490: ...0479 0024 01 ...







































































